Gesture Recognition
Introduction
Gesture
- a movement usually of the body or limbs that expresses or emphasizes an idea, sentiment, or attitude
- the use of motions of the limbs or body as a means of expression
Automatic Gesture Recognition
- A gesture recognition system generates a semantic description for certain body motions
- Gesture recognition exploits the power of non-verbal communication, which is very common in human-human interaction
- Gesture recognition is often built on top of a human motion tracker
Applications
- Multimodal Interaction
- Gestures + Speech recognition
- Gestures + gaze
- Human-Robot Interaction
- Interaction with Smart Environments
- Understanding Human Interaction
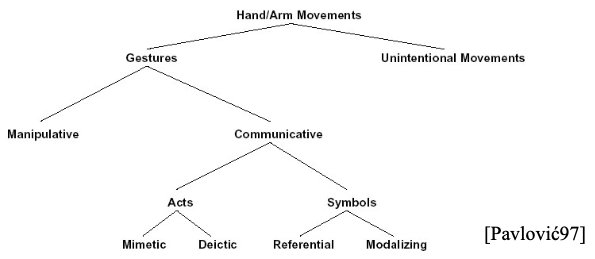
Types of Gestures
Hand & arm gestures
- Pointing Gestures
- Sign Language
Head gestures
- Nodding, head shaking, turning, pointing
Body gestures
Automatic Gesture Recognition
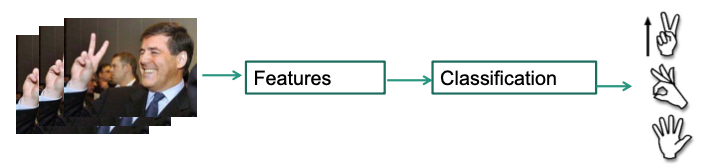
- Feature Acquisition
- Appearances: Markers, color, motion, shape, segementation, stereo, local descriptors, space-time interest points, …
- Model based: body- or hand-models
- Classifiers
- SVM, ANN, HMMs, Adaboost, Dec. Trees, Deep Learning …
Hidden Markov Models (HMMs) for Gesture Recognition
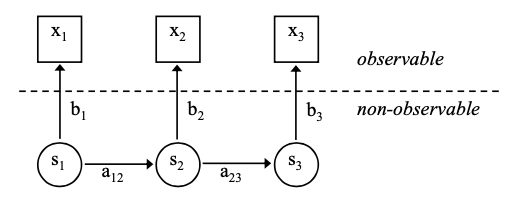
“hidden”: comes from observing observations and drawing conclusions WITHOUT knowing the hidden sequence of states
Markov assumption (1st order): the next state depends ONLY on the current state (not on the complete state history)
A Hidden Markov Model is a five-tuple $$ (S, \pi, \mathbf{A}, B, V) $$
- $S = \{s_1, s_2, \dots, s_n\}$: set of states
- $\pi$: the initial probability distribution
- $\pi(s_i)$ = probability of $s_i$ being the first state of a state sequence
- $\mathbf{A} = (a_{ij})$: the matrix of state transition probabilities
- $(a_{ij})$: probability of state $s_j$ following $s_i$
- $B = \{b_1, b_2, \dots, b_n\}$: the set of emission probability distributions/densities
- $b_i(x)$: probability of observing $x$ when the system is in state $s_i$
- $V$: the observable feature space
- Can be discrete ($V = \{x_1, x_2, \dots, x_v\}$) or continuous ($V = \mathbb{R}^d$)
Properties of HMMs
For the initial probabilities: $$ \sum_i \pi(s_i) = 1 $$
- Often simplified by $$ \pi(s_1) = 1, \quad \pi(s_i > 1) = 0 $$
For state transition probabilities: $$ \forall i: \sum_j a_{ij} = 1 $$
- Often: $a_{ij} = 0$ for most $j$ except for a few states
When $V = \{x_1, x_2, \dots, x_v\}$ then $b_i$ are discrete probability distributions, the HMMs are called discrete HMMs
When $V = \mathbb{R}^d$ then $b_i$ are continuous probability density functions, the HMMs are called continuous (density) HMMs
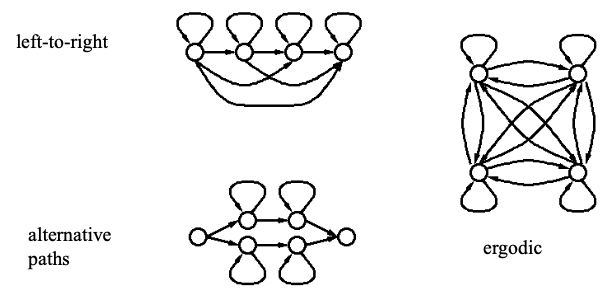
HMM Topologies
The Observation Model
Most popular: Gaussian mixture models $$ P\left(x_{t} \mid s_{j}\right)=\sum_{k=1}^{n_{j}} c_{j k} \cdot \frac{1}{\sqrt{(2 \pi)^{n}\left|\Sigma_{j k}\right|}} e^{-\frac{1}{2}\left(x_{t}-\mu_{j k}\right)^{\mathrm{T}} \Sigma_{j k}^{-1}\left(x_{t}-\mu_{j k}\right)} $$
- $n_j$: number of Gaussians (in state $j$)
- $c_{jk}$: mixture weight for $k$-th Gaussian (in state $j$)
- $\mu_{jk}$: means of $k$-th Gaussian (in state $j$)
- $\Sigma_{jk}$: covariane matrix of $k$-th Gaussian (in state $j$)
Three Main Tasks with HMMs
Given an HMM $\lambda$ and an observation $x_1, x_2, \dots, x_T$
The evaluation problem
compute the probability of the observation $p(x_1, x_2, \dots, x_T | \lambda)$
$\rightarrow$ “Forward Algorithm”
The decoding problem
compute the most likely state sequence $s_{q1}, s_{q2}, \dots, s_{qT}$, i.e. $$ \operatorname{argmax}_{q 1, \ldots, q \tau} p\left(q_{1}, . ., q_{T} \mid x_{1}, x_{2}, \ldots, x_{T}, \lambda\right) $$ $\rightarrow$ “Viterbi-Algorithm”
The learning/optimization problem
Find an HMM $\lambda^\prime$ s.t. $p\left(x_{1}, x_{2}, \ldots, x_{T} \mid \lambda^{\prime}\right)>p\left(x_{1}, x_{2}, \ldots, x_{T} \mid \lambda\right)$
$\rightarrow$ “Baum-Welch-Algo”, “Viterbi-Learning”
Sign Language Recognition
- American Sign Language (ASL)
- 6000 gesture describe persons, places and things
- Exact meaning and strong rules of context and grammar for each
- Sign recognition
- HMM ideal for complex and structured hand gestures of ASL
Feature extraction
- Camera either located as a 1st-person and a 2nd-person view
- Segment hand blobs by a skin color model
HMM for American Sign Language
Four-State HMM for each word
Training
- Automatic segmentation of sentences in five portions
- Initial estimates by iterative Viterbi-alignment
- Then Baum-Welch re-estimation
- No context used
Recognition
- With and without part-of-speech grammar
- All features / only relative features used
ASL Results
Desk-based
348 training and 94 testing sentences without contexts
Accuracy: $$ Acc = \frac{N-D-S-I}{N} $$
- $N$: #Words
- $D$: #Deletions
- $S$: #Substituitions
- $I$: #Insertions
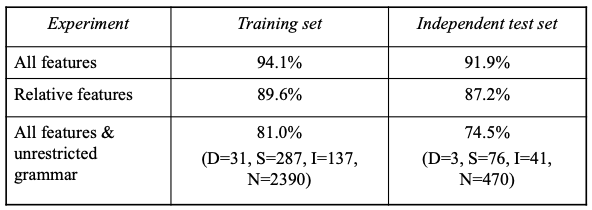
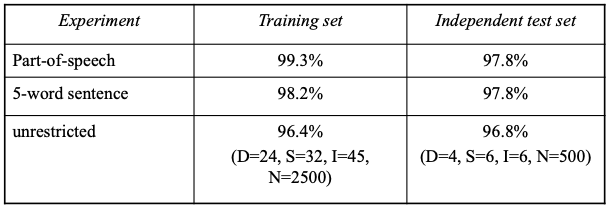
Wearable-based
- 400 training sentences and 100 for testing
- Test 5-word sentences
- Restricted and unrestricted similar!
Pointing Gesture Recognition
Pointing gestures
are used to specify objects and locations
can be needful to resolve ambiguities in verbal statements
Definition: Pointing gesture = movement of the arm towards a pointing target
Tasks
- Detect occurrence of human pointing gestures in natural arm movements
- Extract the 3D pointing direction