👍 Activation Functions
Activation functions should be
- non-linear
- differentiable (since training with Backpropagation)
Q: Why can’t the mapping between layers be linear?
A: Compositions of linear functions is still linear, whole network collapses to regression.
Sigmoid
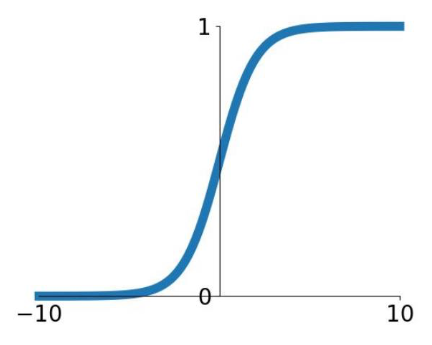 $$
\sigma(x)=\frac{1}{1+\exp (-x)}
$$
$$
\sigma(x)=\frac{1}{1+\exp (-x)}
$$Squashes numbers to range $[0,1]$
✅ Historically popular since they have nice interpretation as a saturating “firing rate” of a neuron
⛔️ Problems
- Vanishing gradients: functions gradient at either tail of $1$ or $0$ is almost zero
- Sigmoid outputs are not zero-centered (important for initialization)
- $\exp()$ is a bit compute expensive
Derivative $$ \frac{d}{dx} \sigma(x) = \sigma(x)(1 - \sigma(x)) $$ (See: Derivative of Sigmoid Function)
Python implementation
def sigmoid(x): return 1 / (1 + np.exp(-x))Derivative
def dsigmoid(y): return y * (1 - y)
Tanh
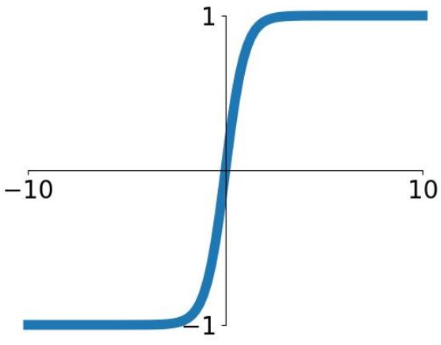
Squashes numbers to range $[-1,1]$
✅ zero centered (nice) 👏
⛔️ Vanishing gradients: still kills gradients when saturated
Derivative: $$ \frac{d}{dx}\tanh(x) = 1 - [\tanh(x)]^2 $$
def dtanh(y): return 1 - y * y
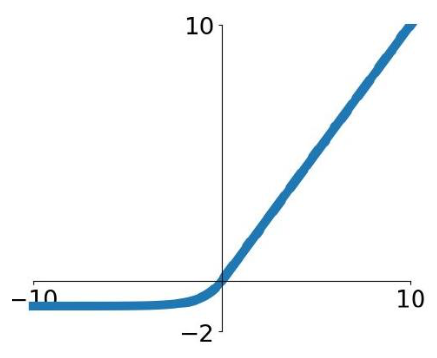
Rectified Linear Unit (ReLU)
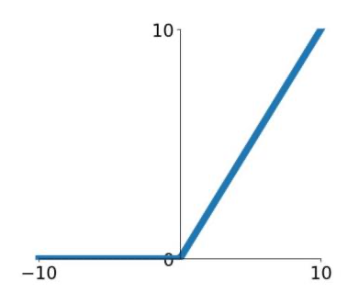 $$
f(x) = \max(0, x)
$$
$$
f(x) = \max(0, x)
$$✅ Advantages
- Does not saturate (in $[0, \infty]$)
- Very computationally efficient
- Converges much faster than sigmoid/tanh in practice
⛔️ Problems
- Not zero-centred output
- No gradient for $x < 0$ (dying ReLU)
Python implementation
import numpy as np def ReLU(x): return np.maximum(0, x)
Leaky ReLU
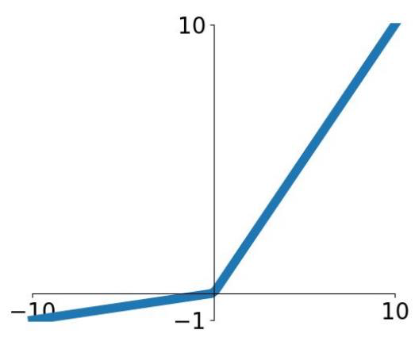 $$
f(x) = \max(0.1x, x)
$$
$$
f(x) = \max(0.1x, x)
$$Parametric Rectifier (PReLu) $$ f(x) = \max(\alpha x, x) $$
- Also learn $\alpha$
✅ Advantages
- Does not saturate
- Computationally efficient
- Converges much faster than sigmoid/tanh in practice!
- will not “die”
Python implementation
import numpy as np def ReLU(x): return np.maximum(0.1 * x, x)
Exponential Linear Units (ELU)
 $$
f(x) = \begin{cases} x &\text{if }x > 0 \\\\
\alpha(\exp (x)-1) & \text {if }x \leq 0\end{cases}
$$
$$
f(x) = \begin{cases} x &\text{if }x > 0 \\\\
\alpha(\exp (x)-1) & \text {if }x \leq 0\end{cases}
$$- ✅ Advantages
- All benefits of ReLU
- Closer to zero mean outputs
- Negative saturation regime compared with Leaky ReLU (adds some robustness to noise)
- ⛔️ Problems
- Computation requires $\exp()$
Maxout
$$ f(x) = \max \left(w_{1}^{T} x+b_{1}, w_{2}^{T} x+b_{2}\right) $$
- Generalizes ReLU and Leaky ReLU
- ReLU is Maxout with $w_1 =0$ and $b_1 = 0$
- ✅ Fixes the dying ReLU problem
- ⛔️ Doubles the number of parameters
Softmax
- Softmax: probability that feature $x$ belongs to class $c_k$ $$ o_k = \theta_k^Tx \qquad \forall k = 1, \dots, j $$
$$ p\left(y=c_{k} \mid x ; \boldsymbol{\theta}\right)= p\left(c_{k} = 1 \mid x ; \boldsymbol{\theta}\right) = \frac{e^{o_k}}{\sum_{j} e^{o_j}} $$
- Derivative: $$ \frac{\partial p(\hat{\mathbf{y}})}{\partial o_{j}} =y_{j}-p\left(\hat{y}_{j}\right) $$
Advice in Practice
- Use ReLU
- Be careful with your learning rates / initialization
- Try out Leaky ReLU / ELU / Maxout
- Try out tanh but don’t expect much
- Don’t use sigmoid