HMM und Wonham Filter
Das Hidden Markov Model (HMM) ist ein stochastisches Modell, in dem ein System durch eine Markowkette mit unbeobachteten Zuständen modelliert wird.
Die Modellierung als Markowkette bedeutet, dass das System auf zufällige Weise von einem Zustand in einen anderen übergeht, wobei die Übergangswahrscheinlichkeiten nur jeweils vom aktuellen Zustand abhängen, aber nicht von den davor eingenommenen Zuständen.
Ein HMM besteht aus
Systemmodell / Übergangswahrscheinlichkeiten / Transitionsmatrix $\mathbf{A}$
Messmodell / Emissionswahrscheinlichkeiten / Messmatrix $\mathbf{B}$
Zustandsraum; Zustandswahrscheinlichkeiten $\xi_{k}^{\boldsymbol{x}}$
Messungen; Emissionswahrscheinlichkeiten $\xi_{k}^{\boldsymbol{y}}$
Initialer Zustand $x_0$ oder initiale Zustandswahrscheinlichkeit $\xi_{0}^{\boldsymbol{x}}$
Beispiel (Übungsblatt 4.2)
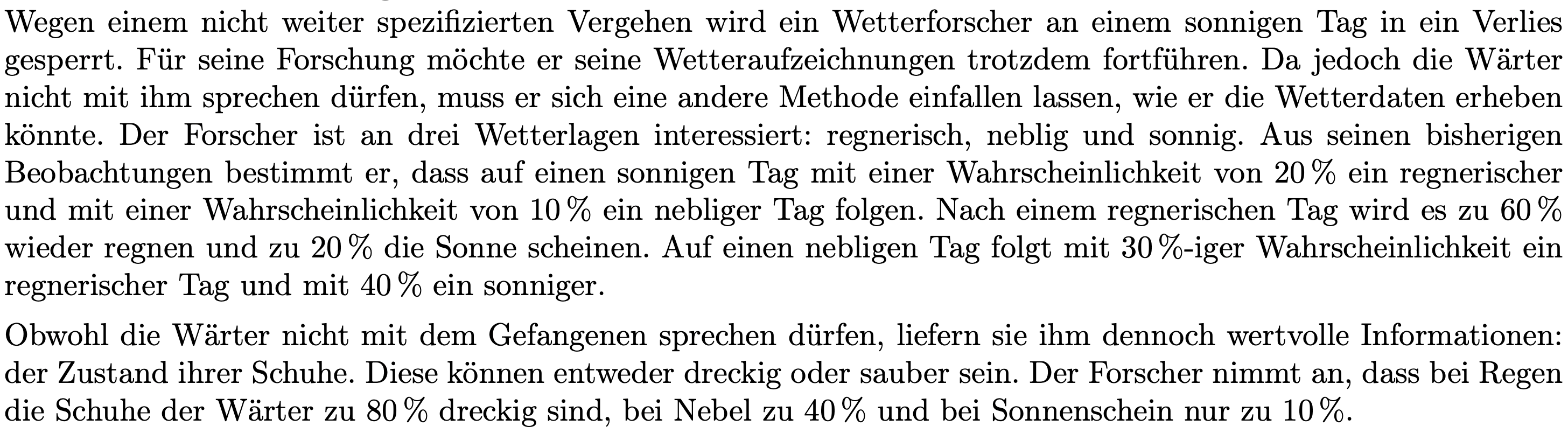
Zustandsraum
$$ \begin{aligned} S &=\{\text { Sonniger Tag }\} \\ R &=\{\text { Regnerischer Tag }\} \\ N &=\{\text { Nebliger Tag }\} \end{aligned} $$Zustandsvektor
$$ \xi_{k}^{\boldsymbol{x}}=\left[\begin{array}{l} \mathrm{P}\left(\boldsymbol{x}_{k}=S\right) \\ \mathrm{P}\left(\boldsymbol{x}_{k}=R\right) \\ \mathrm{P}\left(\boldsymbol{x}_{k}=N\right) \end{array}\right] $$Transiitonsmatrix
$$ \mathbf{A}=\left[\begin{array}{lll} 0.7 & 0.2 & 0.1 \\ 0.2 & 0.6 & 0.2 \\ 0.4 & 0.3 & 0.3 \end{array}\right] $$Messwerte
$$ \begin{array}{l} d=\{\text { dreckige Schuhe }\} \\ s=\{\text { saubere Schuhe }\} \end{array} $$Messvektor
$$ \underline{\xi}_{k}^{\boldsymbol{y}}=\left[\begin{array}{l} \mathrm{P}\left(\boldsymbol{z}_{k}=d\right) \\ \mathrm{P}\left(\boldsymbol{z}_{k}=s\right) \end{array}\right] $$Messmatrix
$$ \mathbf{B}=\left[\begin{array}{ll} 0.1 & 0.9 \\ 0.8 & 0.2 \\ 0.4 & 0.6 \end{array}\right] $$Initiale Zustandswahrscheinlichkeit $\xi_{0}^{\boldsymbol{x}}$ und initialer Zustand $x_0$
$$ \underline{\xi}_{0}^{\boldsymbol{x}}=\left[\begin{array}{l} 1 \\ 0 \\ 0 \end{array}\right] ; \quad x_{0}=S $$
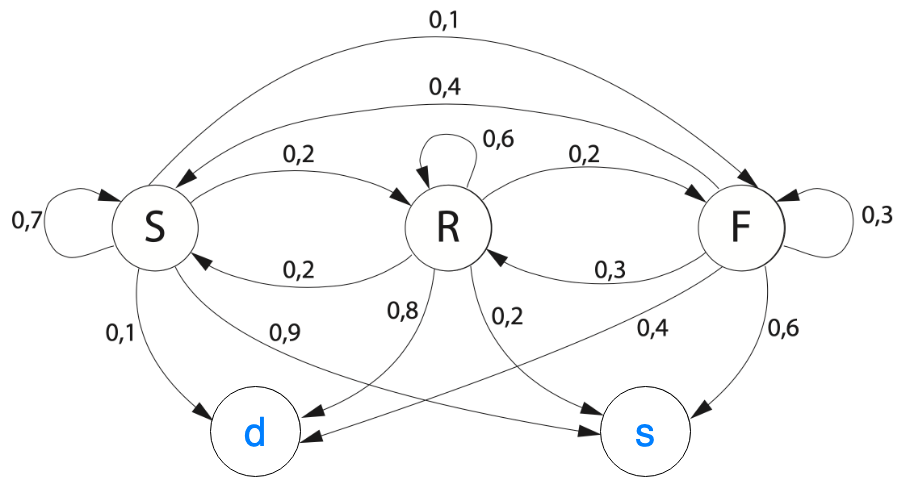
Modell als Zustandsdiagramm mit Übergangswahrscheinlichkeiten
Wonham-Filter
Das Wonham Filter ist ein rekursives Filter für Zustandschätzung für wertdiskrete Systeme.
Das Wonham Filter besteht aus zwei Phasen
Prädiktion
$$ \underline{\xi}_{k \mid 1: k-1}^{x}=\mathbf{A}_{k}^{\top} \underline{\xi}_{k-1\mid1: k-1}^{x} $$- $\mathbf{A}_k$ : Transitionsmatrix
- $\underline{\xi}_{k-1\mid1: k-1}^{x}$ : letzte Zustandsschätzung
Filterung
Für Messung $y_k = m$:
$$ \underline{\xi}_{k \mid 1: k}^{x} =\frac{\mathbf{B}(:, m) \odot \xi_{k \mid 1: k-1}^{x}}{\mathbb{1}_{N}^{T} \operatorname{diag}(\mathbf{B}(:, m)) \cdot \xi_{k \mid 1: k-1}^{x}} =\frac{\mathbf{B}(:, m) \odot \xi_{k \mid 1: k-1}^{x}}{\mathbf{B}(:, m)^\top \cdot \xi_{k \mid 1: k-1}^{x}} $$
(Mehr über Wonham filter siehe hier)
Beispiel (weiter)

Zeitpunkt $k=1$:
$$ \begin{array}{l} \underline{\xi}_{1}^{p}=\mathbf{A}^{\top} \underline{\xi}_{0}^{\boldsymbol{x}}=\left[\begin{array}{l} 0.7 \\ 0.2 \\ 0.1 \end{array}\right] \\\\ \underline{\xi}_{1}^{e}=\frac{\mathbf{B}(:, 1) \odot \underline{\xi}_{1}^{p}}{\mathbf{B}(:, 1)^{\top} \underline{\xi}_{1}^{p}}=\frac{\left[\begin{array}{l} 0.1 \\ 0.8 \\ 0.4 \end{array}\right] \odot\left[\begin{array}{l} 0.7 \\ 0.2 \\ 0.1 \end{array}\right]}{\left[\begin{array}{lll} 0.1 & 0.8 & 0.4 \end{array}\right]\left[\begin{array}{l} 0.7 \\ 0.2 \\ 0.1 \end{array}\right]}=\frac{\left[\begin{array}{l} 0.07 \\ 0.16 \\ 0.04 \end{array}\right]}{0.27}=\left[\begin{array}{l} 0.25926 \\ 0.59259 \\ 0.14815 \end{array}\right] \end{array} $$$P(\boldsymbol{x}_1 = R) = 0.59259$ ist die größst in $\underline{\xi}_{1}^{e}$. $\Rightarrow$ Die Schätzung deutet auf einen regnerischen Tag.
Zeitpunkt $k=2$:
$$ \begin{aligned} \underline{\xi}_{2}^{p} &=\mathbf{A}^{\top} \underline{\xi}_{1}^{e}=\left[\begin{array}{l} 0.35926 \\ 0.45185 \\ 0.18889 \end{array}\right] \\ \underline{\xi}_{2}^{e} &=\frac{\mathbf{B}(:, 1) \odot \xi_{2}^{p}}{\mathbf{B}(:, 1)^{\top} \xi_{2}^{p}}=\left[\begin{array}{l} 0.07596 \\ 0.76429 \\ 0.15975 \end{array}\right] \end{aligned} $$$\Rightarrow$ Die Schätzung deutet auf einen regnerischen Tag.
Zeitpunkt $k=3$:
$$ \underline{\xi}_{3}^{p}=\mathbf{A}^{\top} \underline{\xi}_{2}^{e}=\left[\begin{array}{l} 0.26993 \\ 0.52169 \\ 0.20838 \end{array}\right] $$ $$ \xi_{3}^{e}=\frac{\mathbf{B}(:, 2) \odot \xi_{3}^{p}}{\mathbf{B}(:, 2)^{\top} \xi_{3}^{p}}=\left[\begin{array}{l} 0.51437 \\ 0.22091 \\ 0.26472 \end{array}\right] $$$\Rightarrow$ Die Schätzung deutet auf einen sonnigen Tag.
Zeitpunkt $k=4$:
$$ \begin{array}{l} \underline{\xi}_{4}^{p}=\mathbf{A}^{\top} \underline{\xi}_{3}^{e}=\left[\begin{array}{ll} 0.510 & 13 \\ 0.314 & 84 \\ 0.175 & 04 \end{array}\right]\\ \xi_{4}^{e}=\frac{\mathbf{B}(:, 2) \odot \xi_{4}^{p}}{\mathbf{B}(:, 2)^{\top} \xi_{4}^{p}}=\left[\begin{array}{l} 0.73212 \\ 0.10041 \\ 0.16747 \end{array}\right] \end{array} $$$\Rightarrow$ Die Schätzung deutet auf einen sonnigen Tag.
Beispiel (weiter)

Lösung: