Facial Feature Detection
Introduction
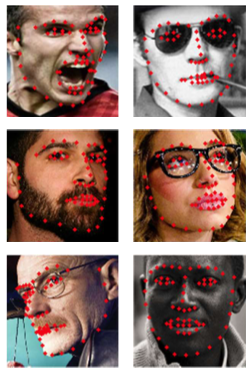
What are facial features?
Facial features are referred to as salient parts of a face region which carry meaningful information.
- E.g. eye, eyeblow, nose, mouth
- A.k.a facial landmarks
What is facial feature detection?
Facial feature detection is defined as methods of locating the specific areas of a face.
Applications of facial feature detection
- Face recognition
- Model-based head pose estimation
- Eye gaze tracking
- Facial expression recognition
- Age modeling
Problems in facial feature detection
Identity variations
Each person has unique facial part
Expression variations
Some facial features change their state (e.g. eye blinks).
Head rotations
If a head orientation changes, the visual appearance also changes.
Scale variations
Changes in resolution and distance to the camera affect appearance.
Lighting conditions
Light has non-linear effects on the pixel values of a image.
Occlusions
Hair or glasses might hide facial features.
Older approaches (from face detection)
- Integral projections + geometric constraints
- Haar-Filter Cascades
- PCA-based methods (Modular Eigenspace)
- Morphable 3D Model
Statistical appearance models
- 💡 Idea: make use of prior-knowledge, i.e. models, to reduce the complexity of the task
- Needs to be able to deal with variability $\rightarrow$ deformable models
- Use statistical models of shape and texture to find facial landmark points
- Good models should
- Capture the various characteristics of the object to be detected
- Be a compact representation in order to avoid heavy calculation
- Be robust against noise
Basic idea
- Training stage: construction of models
- Test stage: Search the region of interest (ROI)
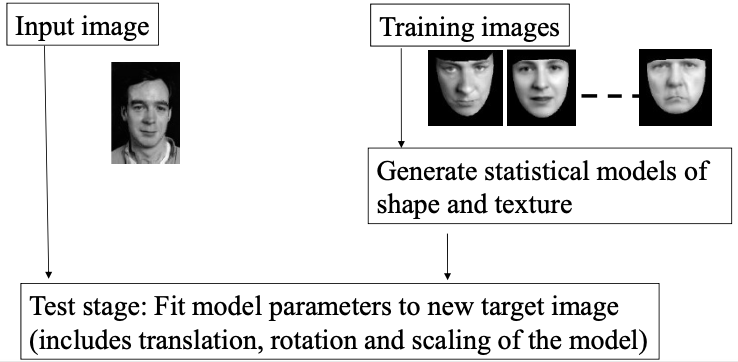
Appearance models
Represent both texture and shape
Statistical model learned from training data
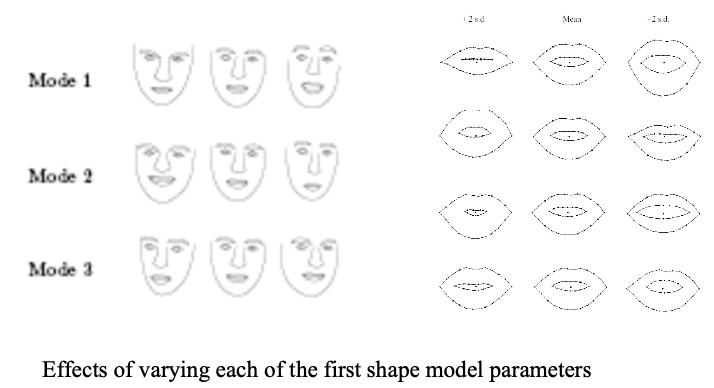
Modeling shape variability
- Landmark points
Model
$$ x \approx \bar{x}+P\_{s} b\_{s} $$- $\bar{x}$: Mean vector
- $P\_s$: Eigenvectors of covariance matrix
- $b\_s = P\_s^T(x - \bar{x})$
Modeling intensity variability:
Gray values
$$ h=\left[g\_{1}, g\_{2}, \ldots, g\_{k}\right]^{T} $$Model
$$ h \approx \bar{h} + P\_ib\_i $$- $\bar{h}$: Mean vector
- $P\_s$: Eigenvectors of covariance matrix
- $b\_i = P\_i^T(h - \bar{h})$
Training of appearance models
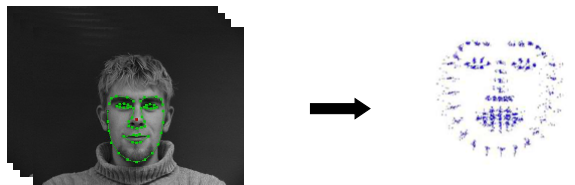
1. Construct a shape model with Principal component analysis (PCA)
A shape is represented with manually labeled points.

The shape model approximates the shape of an object.
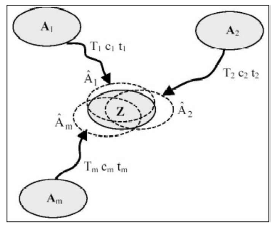
Procrustes Analysis
Align the shapes all together to remove translation, rotation and scaling
PCA
The positions of labeled points are
$$ x = \bar{x}+P\_{s} b\_{s} $$- $\bar{x}$: Mean shape
- $P\_s$: Orthogonal modes of variation obtained by PCA
- $b\_s$: Shape parameters in the projected space
The shapes are represented with fewer parameters ($\operatorname{Dim}(x) > \operatorname{Dim}(b\_s)$)
Generating plausible shapes:
2. Construct a texture model which represents grey-scale (or color) values at each point
Warp the image so that the labeled points fit on the mean shape
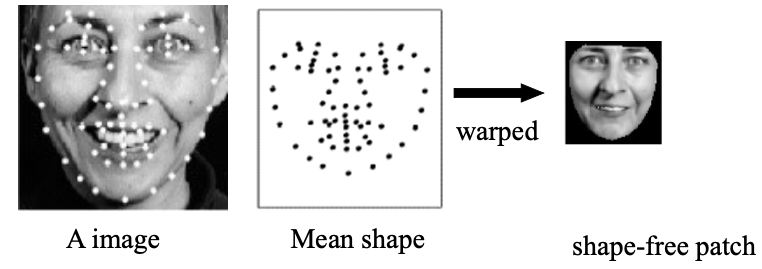
Then normalize the intensity on the shape-free patch.
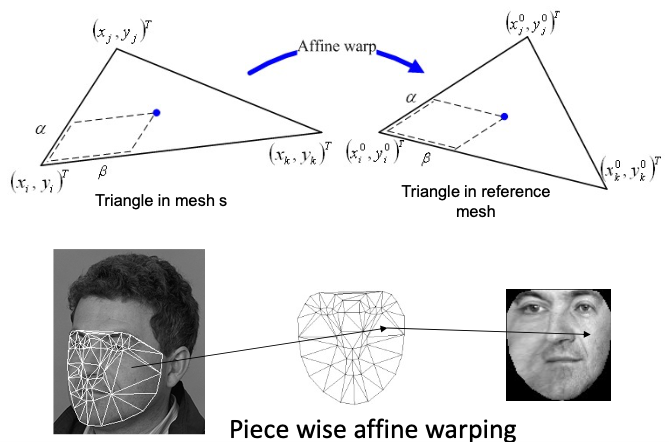
Texture warping
Texture model
The pixel values on the shape-free patch
$$ g = \bar{g} + P\_g b\_g $$- $\bar{g}$ : Mean of normalized pixel values
- $P\_g$ : Orthogonal modes of variation obtained by PCA
- $b\_g$: Texture parameters in the projected space
The pixel values (appearance) are presented with fewer parameters ($\operatorname{Dim}(g) > \operatorname{Dim}(b\_g)$)
3. Model the correlation between shapes and grey-level models
The concatenated vector is
$$ b=\left(\begin{array}{c} W\_{s} b\_{s} \\\\ b\_{g} \end{array}\right) $$Apply PCA:
$$ b=P\_{c} c=\left(\begin{array}{l} P\_{c s} \\\\ P\_{c g} \end{array}\right)c $$Now the parameter $\mathbf{c}$ can control both shape and grey-level models
The shape model
$$ x=\bar{x}+P\_{s} W\_{s}^{-1} P\_{c s} c $$The grey-level model
$$ g=\bar{g}+P\_{g} P\_{c g} c $$
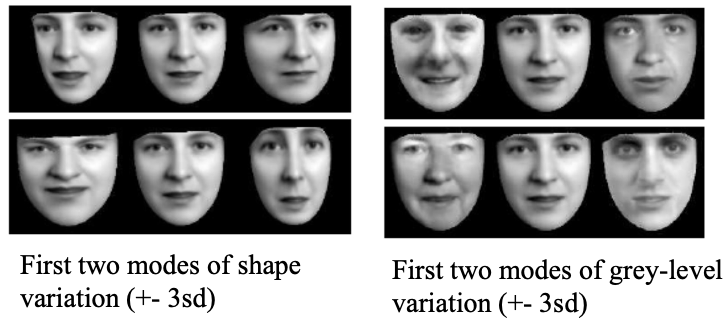
Examples of synthesized faces
Various objects can be synthesized by controlling the parameter $\mathbf{c}$
Dataset for Building Model
IMM data set from Danish Technical University
240 images with 640*480 size; 40 individuals, with 36 males and 4 females.
Each Subject 6 shots, with different pose, expressions and illuminations.
Each image is labeled with 58 landmarks; 3 closed and 4 opened point-paths.
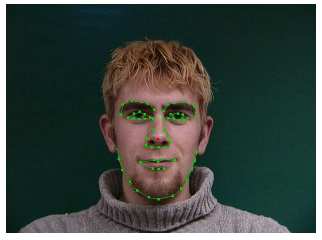
Image Interpretation with Models
- 🎯 Goal: find the set of parameters which best match the model to the image
- Optimize some cost function
- Difficult optimization problem
- Set of parameters
- Defines shape, position, appearance
- Can be used for further processing
Position of landmarks
Face recognition
Facial expression recognition
Pose estimation
- Problem: Optimizing the model fit
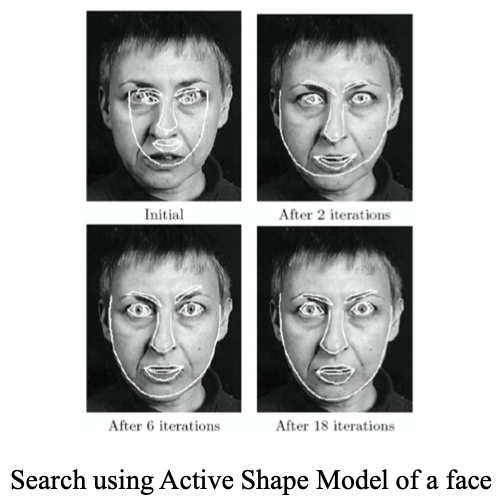
Active Shape Models (ASM)
Given a rough starting position, create an instance of $\mathbf{X}$ of the model using
- shape parameters $b$
- translation $T=(X\_t,Y\_t)$
- scale $s$
- rotation $\theta$
Iterative approach:
- Examine region of the image around $\mathbf{X}\_i$ to find the best nearby match for the point $\mathbf{X}\_i^\prime$
- Update parameters $(b, T, s, \theta)$ to best fit the new points $\mathbf{X}$ (constrain the model parameters to be within three standard deviations)
- Repeat until convergence
In practice: search along profile normals
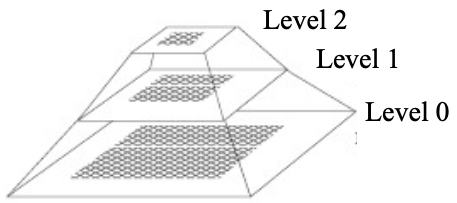
The optimal parameters are searched from multi-resolution images hierarchically (faster algorithm)
- Search for the object in a coarse image
- Refine the location in a series of higher resolution images.
Example of search
Disadvantages
Uses mainly shape constraints for search
Does not take advantage of texture across the target
Active Appearance Models (AAM)
- Optimize parameters, so as to minimize the difference of a synthesized image and the target image
- Solved using a gradient-descent approach
Fitting AAMs
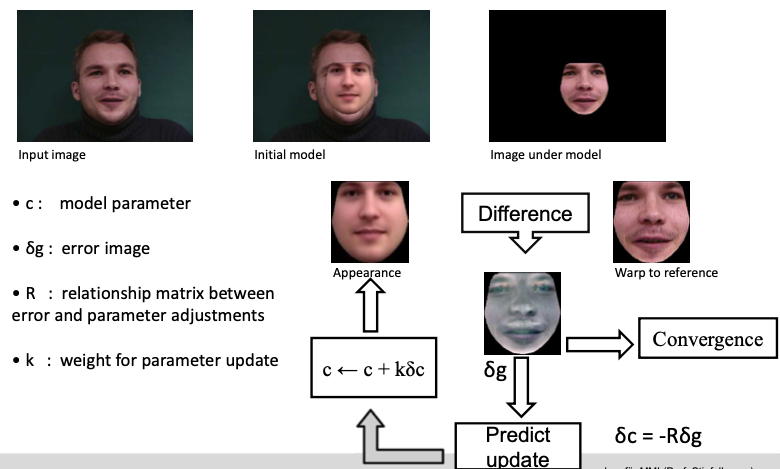
Learning linear relation matrix $\mathbf{R}$ using multi-variate linear regression
Generate training set by perturbing model parameters for training images
Include small displacements in position, scale, and orientation
Record perturbation and image difference
Experimentally, optimal perturbation around 0.5 standard deviations for each parameter
ASM vs. AAM
ASM
- Seeks to match a set of model points to an image, constrained by a statistical model of shape
- Matches model points using an iterative technique (variant of EM-algorithm)
- A search is made around the current position of each point to find a nearby point which best matches texture for the landmark
- Parameters of the shape model are then updated to move the model points closer to the new points in the image
AAM: matches both position of model points and representation of texture of the object to an image
- Uses the difference between current synthesized image and target image to update parameters
- Typically, less landmark points are needed
Summary of ASM and AAM
Statistical appearance models provide a compact representation
Can model variations such as different identities, facial expression, appearances, etc.
Labeled training images are needed (very time-consuming) 🤪
Original formulation of ASM and AAM is computationally expensive (i.e. slow) 🤪
But, efficient extensions and speed-ups exist!
- Multi-resolution search
- Constrained AAM search
- Inverse compositional AAMs (CMU)
Usage
- Facial fiducial point detection
- Face recognition, pose estimation
- Facial expression analysis
- Audio-visual speech recognition
More Modern Approaches: Conditional Random Forests For Real Time Facial Feature Detection1
Basics
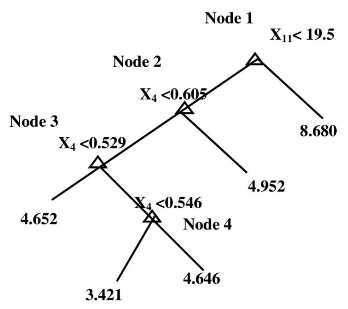
Regression tree
Basically like classification decision tree
In the nodes-decisions are comparison of numbers
In the leafs-numbers or multidimensional vectors of numbers
Example
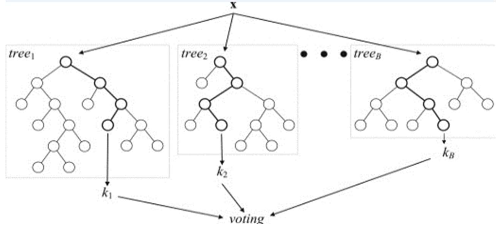
Random regression forests
Set of random regression trees
Random
Different trees trained on random subset of training data
After training, predictions for unseen samples can be made by averaging the predictions from all the individual regression trees
Basic idea
Train different set of trees for different head pose.
The leaf nodes accumulates votes for the different facial fiducial points
Regression forests training
Each Tree is trained from randomly selected set of images.
Extract patches in each image
Training goal: accumulate probability for a feature point $C\_n$ given a patch $P$ at the leaf node
- Each patch is represented by appearance features $I$, and displacement vectors $D$ (offsets) to each of the facial fiducial feature point. I.e. $P = \\{I, D\\}$
- A simple patch comparison is used as Tree-node splitting criterion
Regression forests testing
- Given: a random face image
- Extract densely set of patches from the image
- Feed all patches to all trees in the forest
- Get for each patch $P\_i$ a corresponding set of leafs
- A density estimator for the location of ffp’s is calculated
- Run meanshift to find all locations
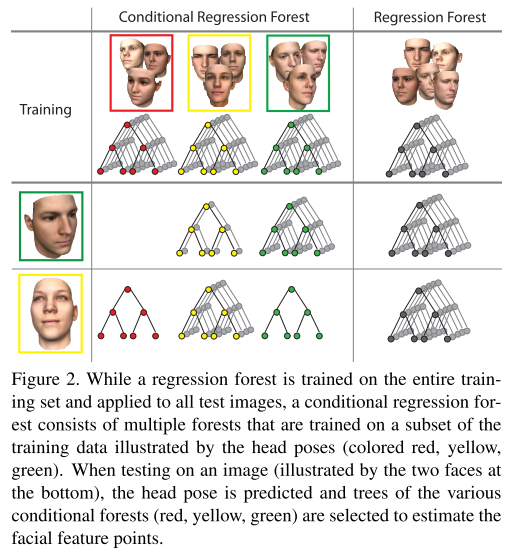
Conditional Regression Forest
Conditional regression tree works alike.
For training:
Compute a probability for a concrete head pose
For each head pose divide the training set in disjoint subsets according to the pose
Train a regression forest for each subset
For testing:
Estimate the probabilities for each head pose
Select trees from different regression forests
Estimate the density function for all facial feature points.
Finalize the exact poition by clustering over all feature candidate votes for a given facial feature point. (e.g., by meanshift)
Experiments and results
Training set:
- 13233 face images from LFW Database
- 10 annotated facial feature points per face image
Training
- Maximum tree depth = 20
- 2500 splitting candidates and 25 thresholds per split
- 1500 images to train each tree
- 200 patches per image (20 * 20 pixels).
- For head pose two different subsets with 3 and 5 head poses are generated (accuracy 72,5%)
- Required time for face detection and head pose estimation is 33 ms.
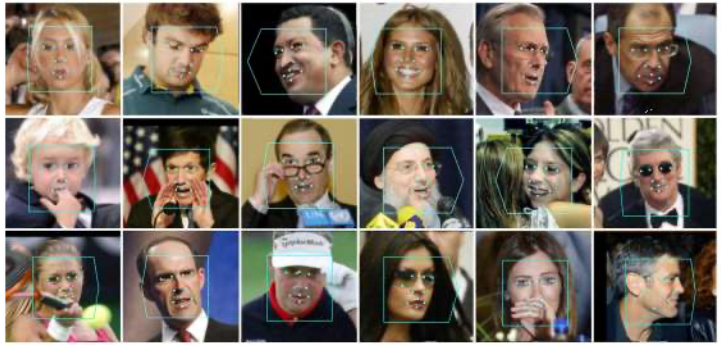
Results
CNN based models
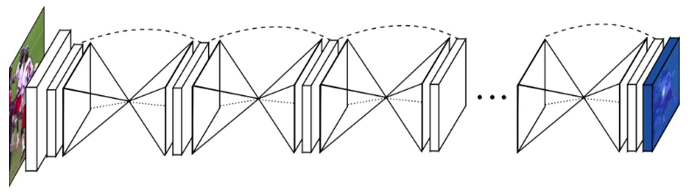
Stacked Hourglass Network 2
Fully-convolutional neural network
Repeated down- and upsampling + shortcut connections
Based on RGB face image, produce one heatmap for each landmark
Heatmaps are transformed into numerical coordinates using DSNT
M. Dantone, J. Gall, G. Fanelli and L. Van Gool, “Real-time facial feature detection using conditional regression forests,” 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 2012, pp. 2578-2585, doi: 10.1109/CVPR.2012.6247976. ↩︎
Newell, A., Yang, K., & Deng, J. (2016). Stacked hourglass networks for human pose estimation. Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), 9912 LNCS, 483–499. https://doi.org/10.1007/978-3-319-46484-8_29 ↩︎