People Detection: Global Approaches
Motivation
Why people detection?
Person Re-Identification
Person Tracking
Security (e.g. Border Control)
Automotive (e.g. Collision Prevention)
Interaction (e.g. Xbox Kinect)
Medical (e.g. Patient Monitoring)
Commercial (e.g. Customer Counting)
Why is people detection difficult?
Clothing
Large variety of clothing styles causes greater appearance variety
Accessories Occlusions by accessories. E.g. backpack, umbrella, handbag, …
Articulation Faces are mostly rigid. Persons can take on many different poses
Clutter People frequently overlap each other in images (crowds)
Categories
Still image vs. video
Still image based
- Mostly based on gray-value information from visual images
- Other possible cues: color, infra-red, radar, stereo
- 👍 Advantage: Applicable in wider variety of applications
- 👎 Disadvantages
- Often more difficult (only a single frame)
- Performs poorer than video based techniques
Video based
Background modeling
Temporal information (speed, position in earlier frames)
Optical flow
Can be (re-)initialized by still image approach
👎 Disadvantage: Hard to apply in unconstrained scenarios
Global vs. parts
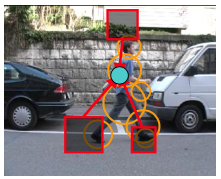
Global approaches
Holistic model, e.g. one feature for whole person

👍 Advantages
- typically simple model
- work well for low resolutions
👎 Disadvantages
- problems with occlusions
- problems with articulations
Part-based approaches
Model body sub-parts separately
👍 Advantages
- deal better with moving body parts (poses)
- able to handle occlusions, overlaps
- sharing of training data
👎 Disadvantages
- require more complex reasoning
- problems with low resolutions
discriminative vs. generative
Generative model
Models how data (i.e. person images) is generated
👍 Advantages
- possibly interpretable, i.e. know why reject/accept
- models the object class/can draw samples
👎 Disadvantages
- model variability unimportant to classification task
- often hard to build good model with few parameters
Discriminative model
Can only discriminate for given data, if it is a person or not
👍 Advantages
- appealing when infeasible to model data itself
- currently often excel in practice
👎 Disadvantages
- often can’t provide uncertainty in predictions
- non-interpretable
Typical components of global approaches
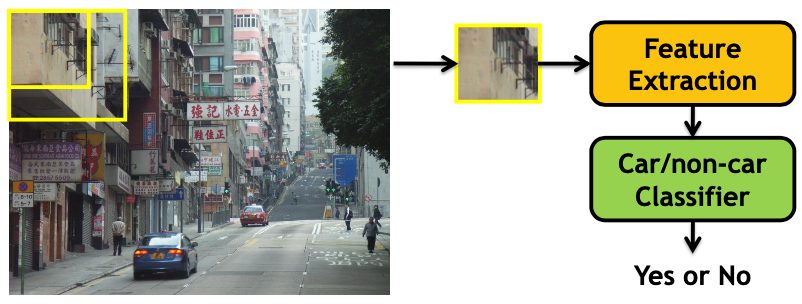
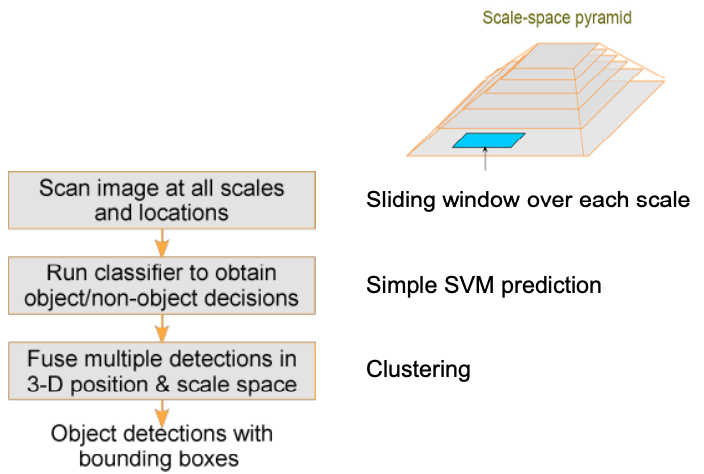
Detection via classification (binary classifier)
Sliding window: Scan window at different positions and scales
Gradient based
Popular and successful in the vision community
Avoid hard decisions (compared to edge based features)
Examples
- Histogram of Oriented Gradients (HOG)
- Scale-Invariant Feature Transform (SIFT)
- Gradient Location and Orientation Histogram (GLOH)
Computing gradients
Centered
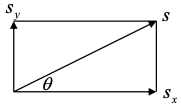
Gradient magnitude
Gradient orientation
Gradient in image
Image: discrete, 2-dimensional signal
Use filter mask to compute gradient
-direction:
-direction
Edge based
Wavelet based
HOG people detector 1
More see: Histogram of Oriented Gradients (HOG)
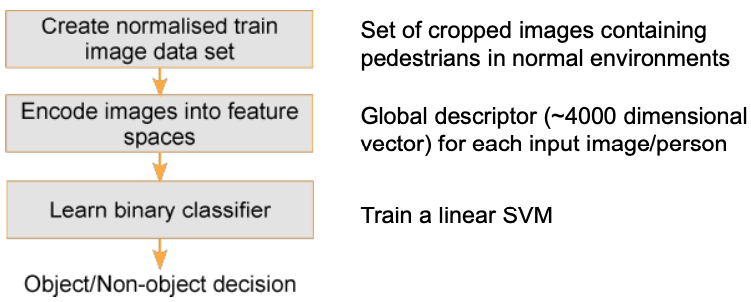
- Gradient-based feature descriptor developed for people detection
- Global descriptor for the complete body
- High-dimensional (typically ~4000 dimensions)
- Very promising results on challenging data sets
Phases
Learning Phase
Detection Phase
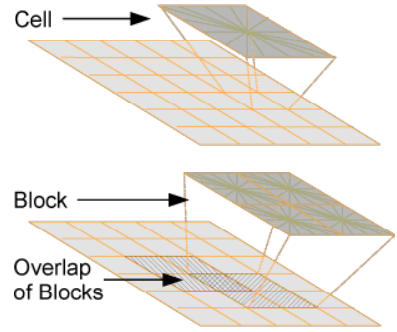
How HOG descriptor works?
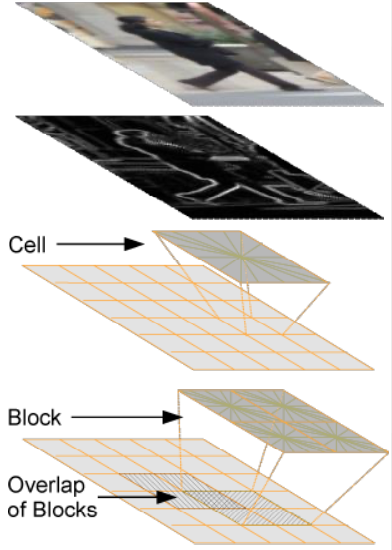
- Compute gradients on an image region of 64x128 pixels
- Compute gradient orientation histograms on cells of 8x8 pixels (in total 8x16 cells). typical histogram size: 9 bins
- Normalize histograms within overlapping blocks of 2x2 cells (in total 7x15 blocks) block descriptor size: 4x9 = 36
- Concatenate block descriptors 7 x 15 x 4 x 9 = 3780 dimensional feature vector
1. Gradients

Convolution with [-1 0 1] filters (x and y direction)
Compute gradient magnitude and direction
Per pixel: color channel with greatest magnitude is used for final gradient (color is used!)

2. Cell histograms

- 9 bins for gradient orientations (0-180 degrees)
- Filled with magnitudes
- Interpolated trilinearly
- bilinearly into spatial cells
- linearly into orientation bins
3. Blocks
- Overlapping blocks of 2x2 cells
- Cell histograms are concatenated and then normalized
- Normalization
- different norms possible (L2, L2hys etc.)
- add a normalization epsilon to avoid division by zero
4. The final HOG descriptor
Concatenation of block descriptors
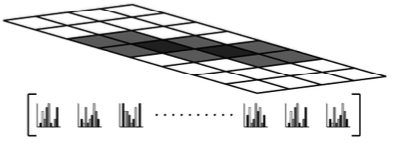
Visualization

From feature to detector
Simple linear SVM on top of the HOG Features
Fast (one inner product per evaluation window)
for an entire image it’s a vector-matrix multiplication
Gaussian kernel SVM
slightly better classification accuracy
but considerable increase in computation time
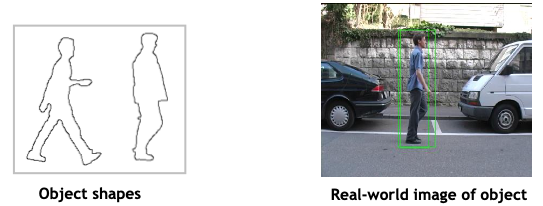
Silhouette Matching 2
Idea
🎯 Goal: align known object shapes with image
Requirements for an alignment algorithm
high detection rate
few false positives
robustness
computationally inexpensive
Computational complexity
Complexity is O(#positions * #templates * #contourpixels * sizeof(searchregion))
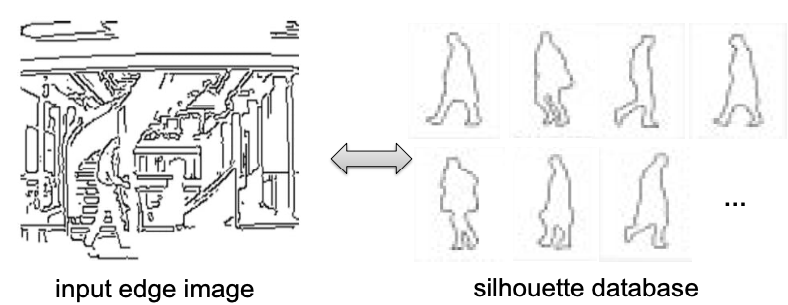
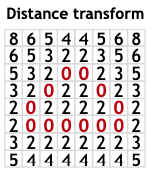
Distance transform
Used to compare/align two (typically binary) shapes
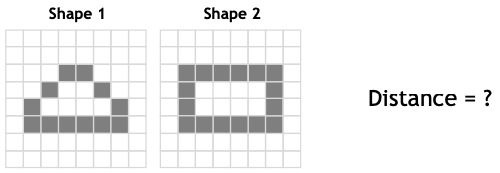
Compute the distance from each pixel to the nearest edge pixel
- here the euclidean distances are approximated by the 2-3 distance
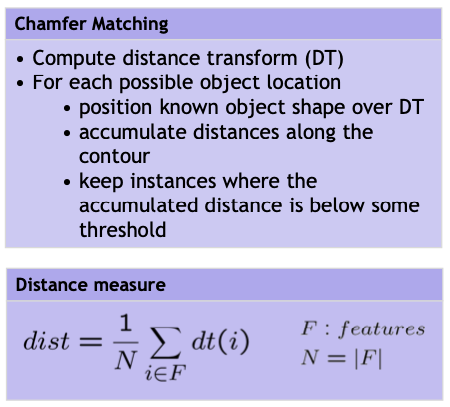
Overlay second shape over distance transform
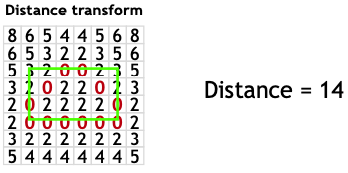
Accumulate distances along shape 2
Find best matching position by an exhaustive search
However:
- 2-3 distance is not symmetric
- 2-3 distance has to be normalized w.r.t. the length of the shapes
Chamfer matching
Efficient Implementation
The distance transform can be efficiently computed by two scans over the complete image
Forward-Scan
starts in the upper-left corner and moves from left to right, top to bottom
uses the following mask

Backward-Scan
starts in the lower-right corner and moves from right to left, bottom to top
uses the following mask

Advantages
- Fast
- Good performance on uncluttered images (with few background structures)
Disadvantages
- Bad performance for cluttered images
- Needs a huge number of people silhouettes
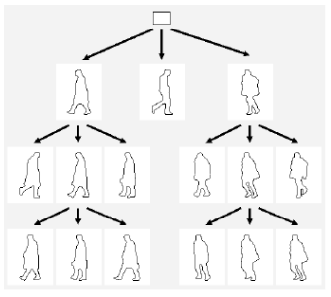
Template Hierarchy
- Reduce the number of silhouettes to consider
- The shapes are clustered by similarity
Coarse-To-Fine Search
Goal: Reduce search effort by discarding unlikely regions with minimal computational effort
Idea:
subsample the image and search first at a coarse scale
only consider regions with a low distance when searching for a match on finer scales
Need to find reasonable thresholds
N. Dalal and B. Triggs, “Histograms of oriented gradients for human detection,” 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR'05), San Diego, CA, USA, 2005, pp. 886-893 vol. 1, doi: 10.1109/CVPR.2005.177. ↩︎
D. M. Gavrila and V. Philomin, “Real-time object detection for “smart” vehicles,” Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 1999, pp. 87-93 vol.1, doi: 10.1109/ICCV.1999.791202. ↩︎