Abstraktion
Abstrahierte Systembeschreibung & Eigenschaften
Alle Komponenten eines Systems können durch
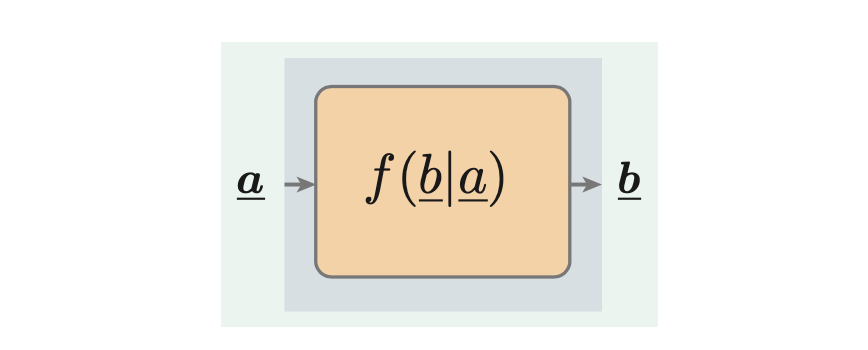
beschrieben werden ($\underline{a} \in \mathbb{R}^A, \underline{b}\in \mathbb{R}^b$ ) .
Kauselität: $a$ (Grund) bewrikt $b$ (Wirkung).
Für $\underline{a}$ gegeben, $f(\underline{b} \mid \cdot)$ heißt Transitionsdichte.
Für $\underline{b}$ gegeben, $f(\cdot \mid \underline{a})$ heißt Likelihood.
Eigenschaften von probabilistischer Systembeschreibung
In Allg. gilt
$$ \int_{\mathbb{R}^{B}} f(\underline{b} \mid \underline{a}) d \underline{b}=1 \quad \forall \underline{a} $$Es gilt aber i.A.
$$ \int_{\mathbb{R}^{A}} f(\underline{b} \mid \underline{a}) d \underline{a} \neq 1, $$sogar nicht definiert.
Vorwärts-/Rückwärtsinferenz
Vorwärtsinferenz
“Given information about $\underline{a}$, we desire information about $\underline{b}$.”
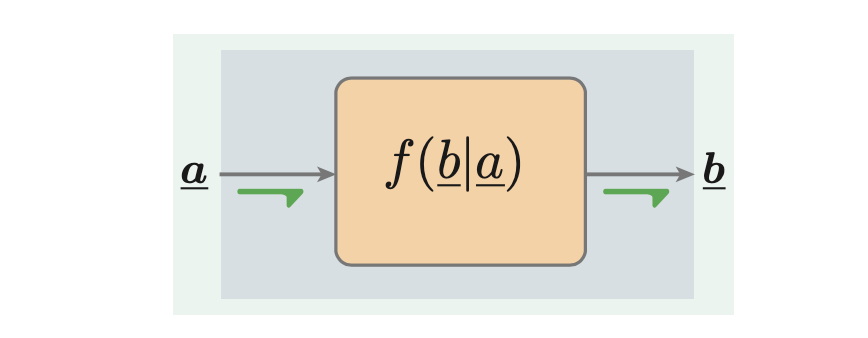
- Gegeben: Werte für $\underline{\hat{a}}$ oder Dichte $f(\underline{a})$
- Gesucht: $f(\underline{b})$
Rückwärtsinferenz
“Information about the output $\underline{b}$ is given and we desire to reconstruct an appropriate description of $\underline{a}$.”
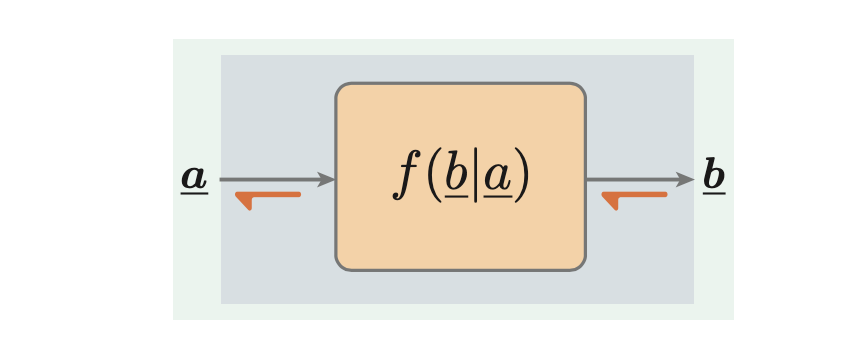
- Gegeben: Werte für $\underline{\hat{b}}$ oder Dichte $f(\underline{b})$
- Gesucht: $f(\underline{a})$
Vorwärtsinferenz
Annahme: KEIN Vorwissen über $f(\underline{b})$
Betrachte eine einfache generative Systemabbildung:
$$ \underline{b} = \underline{g}(\underline{a}) \quad \underline{a} \in \mathbb{R}^A, \underline{b} \in \mathbb{R}^B $$Probablistische Systemabbildung:
$$ f(\underline{b} \mid \underline{a}) = \delta(\underline{b} - \underline{g}(\underline{a})) $$Marginalisierung ergibt:
$$ \begin{aligned} f(\underline{b}) &= \int_{\mathbb{R}^A} f(\underline{a}, \underline{b}) d\underline{a} \\\\ &= \int_{\mathbb{R}^A} f(\underline{a} \mid \underline{b}) f(\underline{a}) d\underline{a} \\\\ &= \int_{\mathbb{R}^A} \delta(\underline{b} - \underline{g}(\underline{a})) f(\underline{a}) d\underline{a} \end{aligned} $$Weitere Vereinfachung NUR für konkrete $\underline{g}(\cdot)$ möglich.
Für Speizialfall der Vorgabe eines Wertes $\underline{\hat{a}}$ ergibt sich
$$ f(\underline{a}) = \delta(\underline{a} - \underline{\hat{a}}) $$Damit
$$ \begin{aligned} f(\underline{b}) &= \int_{\mathbb{R}^A} \delta(\underline{b} - \underline{g}(\underline{a})) f(\underline{a}) d\underline{a} \\\\ &= \int_{\mathbb{R}^A} \delta(\underline{b} - \underline{g}(\underline{a})) \delta(\underline{a} - \underline{\hat{a}}) d\underline{a} \\\\ &= \delta(\underbrace{\underline{b} - g(\underline{\hat{a}})}_{\underline{\hat{b}}}) \end{aligned} $$Das erwartete Ergebnis ist dann
$$ f(\underline{b}) = \delta(\underline{b} - \underline{\hat{b}}) $$mit $\underline{\hat{b}} = \underline{g}(\underline{\hat{a}})$.
Probabilistisches nichtlineares Systemmodell
Allgemeines Systemmodell
$$ \underline{x}_{k+1} = \underline{a}_k(\underline{x}_k, \underline{w}_k) $$in Form $f(\underline{b} \mid \underline{a})$ bringen:
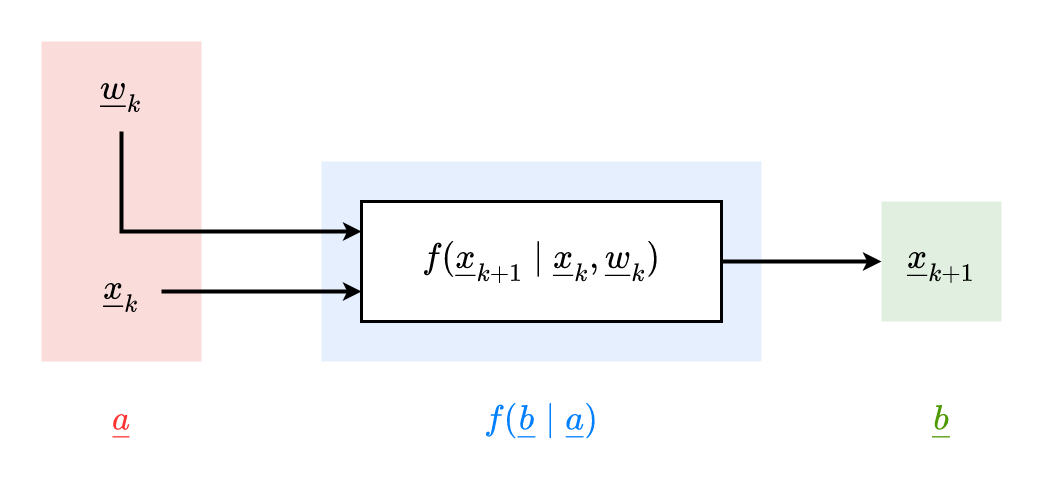 $$
\underline{a}=\left[\begin{array}{c}
\underline{x}_{k} \\
\underline{w}_{k}
\end{array}\right], \quad \underline{b}=\underline{x}_{k+1}
$$
$$
f(\underline{b} \mid \underline{a}) = \delta \left(\underline{x}_{k+1} - \underline{a}_k(\underline{x}_k, \underline{w}_k)\right)
$$
$$
\underline{a}=\left[\begin{array}{c}
\underline{x}_{k} \\
\underline{w}_{k}
\end{array}\right], \quad \underline{b}=\underline{x}_{k+1}
$$
$$
f(\underline{b} \mid \underline{a}) = \delta \left(\underline{x}_{k+1} - \underline{a}_k(\underline{x}_k, \underline{w}_k)\right)
$$Mit anderen Systemgrenzen:
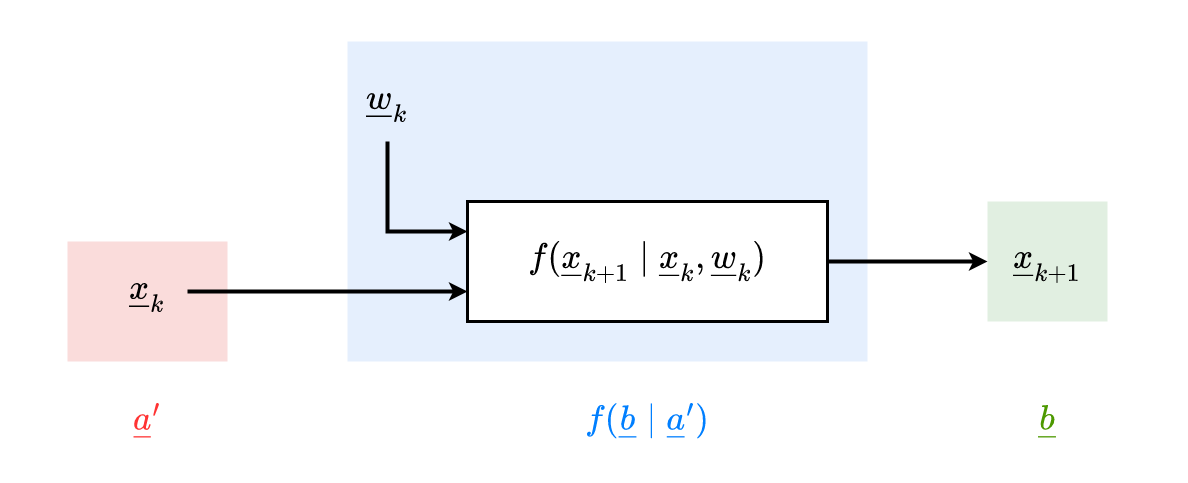
In diesem Fall enthält $f(\underline{b} \mid \underline{a})$ Systemrauschen $\rightarrow$ ist nicht mehr durch $\delta$-funktion beschreibbar.