Wert- und Zeitdiskrete Systeme
Vorbemerkungen
Signale in kontinuierlicher und diskreter Zeit
kontinuierliche (konti.) Zeit
- Zeit ist kontinuierliche Variable
- Signal $s(t)$ nimmt bestimmten Wert $s^*(t^*)$ für beliebig kurze Zeitspanne an
- Zwischen zwei beliebigen Zeitpunkte $t_1$ und $t_2$ liegen unendlich viele Zeitpunkt $t_1 \leq t \leq t_2$
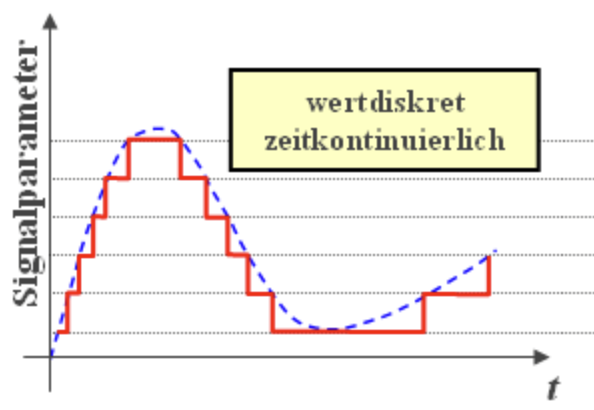
- Werte könne kontinuierlich oder diskret sein
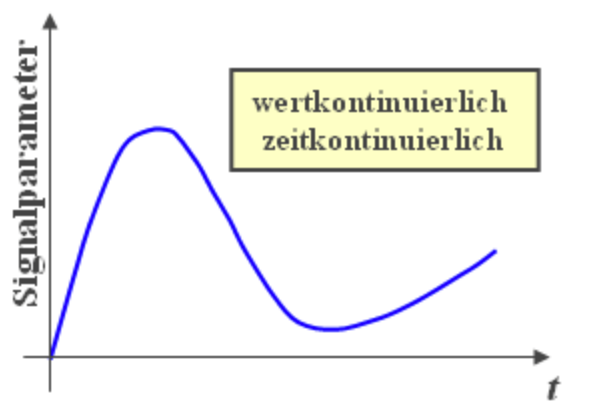
- Kontinuierlich in Zeit und Wert $\rightarrow$ analoges Signal
Diskrete Zeit
Diskrete Zeitpunkt $t_k, k \in \mathbb{Z}$
$$ s_k := s(t_k) $$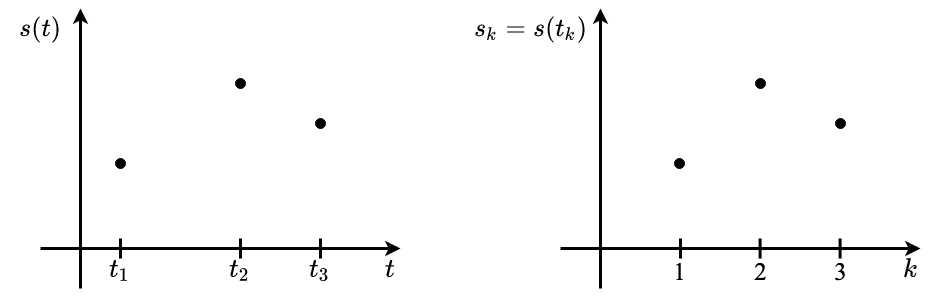
Zeitliche Anordnung der $t_k$ ist beliebig, aber in viele Fällen äquidistant
$$ t_k = k \cdot \Delta \quad k \in \mathbb{Z} $$Wert können kontinuierlich oder diskret sein
- Diskret in Zeit und Ort $\rightarrow$ digitales Signal

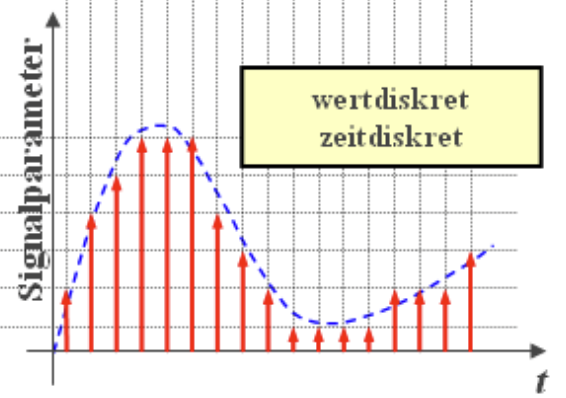
Signale können inhärent zeitdiskret sein, oder aus Abtastung kontinuierliche Signale entstehen.
Kategoriale und Kardinale Variablen
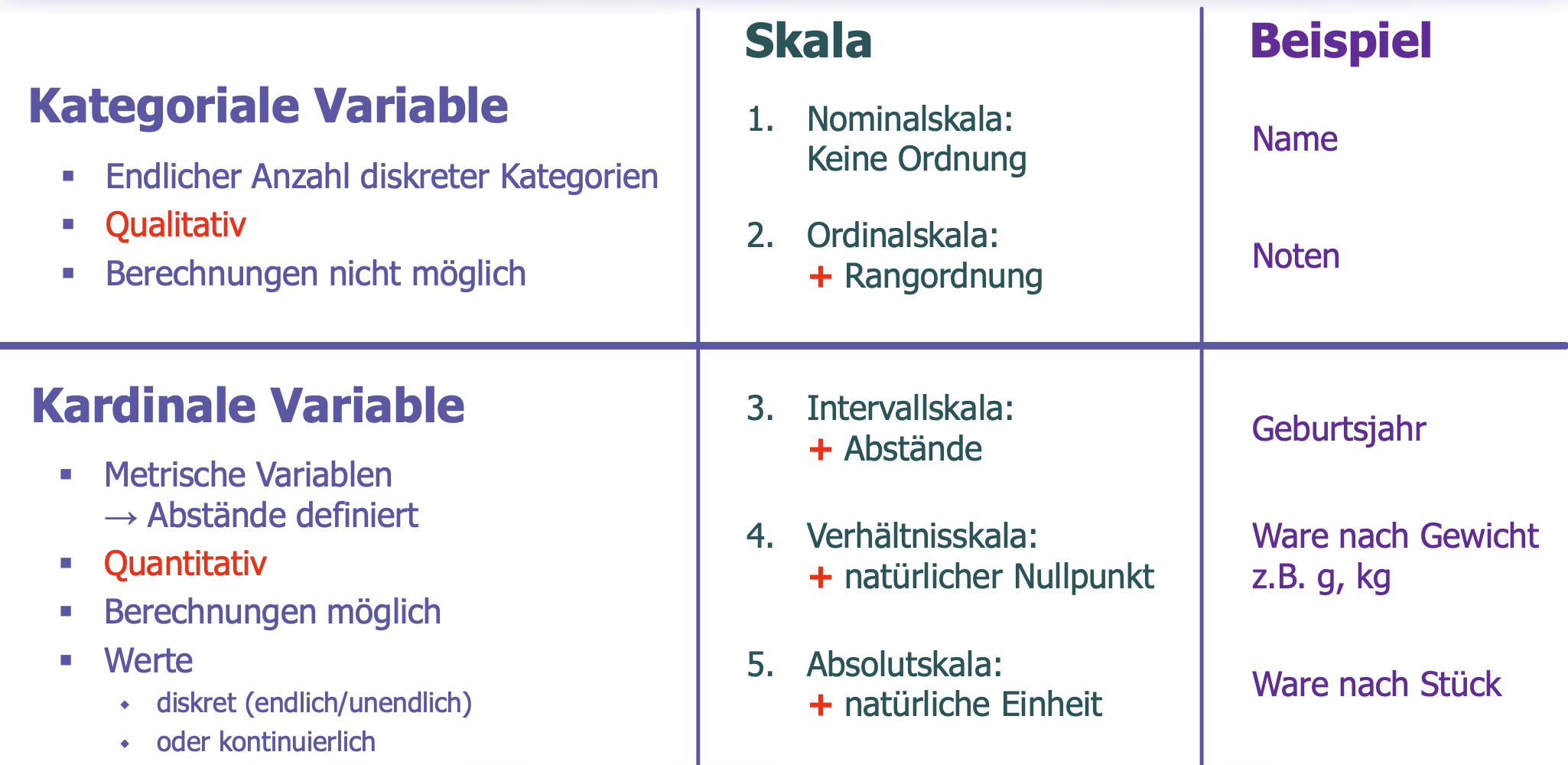
Kategoriale Variable The nominal scale is made up of pure labels. A typical example is the sex of a human. Although nominal values are sometimes represented by digits, one must not interpret them as numbers.Nominal
Ordinal
- The ordinal scale allows comparing values w.r.t. equivalence and rank.
- Any transformation of the domain must preserve the order, which means that the transformation must be strictly increasing.
- But there is still no way to add an offset to one value in order to obtain a new value or to take the difference between two values.
- Example: school grades.
- In the German grading system, the grade 1 (“excellent”) is better than 2 (“good”), which is better than 3 (“satisfactory”) and so on.
- But quite surely the difference in a student’s skills is not the same between the grades 1 and 2 as between 2 and 3, although the “difference” in the grades is unity in both cases.
- In addition, teachers often report the arithmetic mean of the grades in an exam, even though the arithmetic mean does not exist on the ordinal scale. In consequence, it is syntactically possible to compute the mean, even though the result, e.g., 2.47 has no place on the grading scale, other than it being “closer” to a 2 than a 3. The Anglo-Saxon grading system, which uses the letters “A” to “F”, is somewhat immune to this confusion.
- In the German grading system, the grade 1 (“excellent”) is better than 2 (“good”), which is better than 3 (“satisfactory”) and so on.
- The correct average involving an ordinal scale is obtained by the median.
Kardinale Variable
Interval
- The interval scale allows adding an offset to one value to obtain a new one, or to calculate the difference between two values—hence the name.
- However, the interval scale lacks a naturally defined zero. Values from the interval scale are typically represented using real numbers, which contains the symbol “0,” but this symbol has no special meaning and its position on the scale is arbitrary. For this reason, the scalar multiplication of two values from the interval scale is meaningless. Permissible transformations preserve the order, but may shift the position of the zero.
Verhältnis
The ratio scale has a well defined, non-arbitrary zero, and therefore allows calculating ratios of two values.
- This implies that there is a scalar multiplication and that any transformation must preserve the zero.
Many features from the field of physics belong to this category and any transformation is merely a change of units.
Absolut
Wertdiskrete Systeme
Statische Systeme
Ein-/Ausgang: Zufallsvariable $u_k$ (Eingang) und $y_k$ (Ausgang), $k \in \mathbb{N}_0$

$u_k$ und $y_k$ sind wertdiskret, wobei o.B.d.A
$$ \begin{array}{l} u_{k} \in\{1,2, \cdots, p\} \\ y_{k} \in\{1,2, \ldots, M\} \end{array} $$Stochastische Abhängigkeit $y_k$ von $u_k$:
$$ P\left(y_{k}=i \mid u_{k}=j\right) \qquad j \in\{1, \cdots, p\}, i \in\{1, \ldots, m\} $$Anordnung der Wahrscheinlichkeit in Matrix $A_k$:
$$ \mathbf{A}_{k}=\left(\begin{array}{ccc} P\left(y_{k}=1 \mid u_{k}=1\right) & \cdots & P\left(y_{k}=M \mid u_{k}=1\right) \\ \vdots & & \vdots \\ P\left(y_{k}=1 \mid u_{k}=P\right) & \cdots & P\left(y_{k}=M \mid u_{k}=P\right) \end{array}\right) $$Elemente $\geq 0$
Zeilensumme $= 1$
Auftrittswahrscheinlichkeit als Vektoren:
$$ \eta_{k}^{u}=\left(\begin{array}{c} P\left(u_{k}=1\right) \\ P\left(u_{k}=2\right) \\ \vdots \\ P\left(u_{k}=P\right) \end{array}\right) \qquad \eta_{k}^{y}=\left(\begin{array}{c} P\left(y_{k}=1\right) \\ P\left(y_{k}=2\right) \\ \vdots \\ P\left(y_{k}=M\right) \end{array}\right) $$
Berechnung von $\eta_k^y$ aus $\eta_k^u$ (in Vektor-Matrix-Form):
$$ \eta_{k}^{y}=\mathbf{A}_{k}^{\top} \eta_{k}^{u} $$Details
Spezialfall: $u_k = j^*$ ist bekannt, also
$$ \begin{array}{l} P\left(u_{k}=j^{*}\right)=1 \\ P\left(u_{k}=j\right)=0 \quad j=1, \cdots M, j \neq j^{*} \end{array} $$ $$ \begin{aligned} \Rightarrow \quad P\left(y_{k}=i\right) &=\sum_{j=1}^{p} p\left(y_{k}=i \mid u_{k}=j\right) P\left(u_{k}=j\right) \\ &=P\left(y_{k}=i \mid u_{k}=j^{*}\right) \end{aligned} $$In Vektor-Matrix-Form:
$$ \eta_{k}^{y}={\underbrace{\mathbf{A}_{k}\left(j^{*}, :\right)}_{\text{die } j^*-\text{te Zeile von } A_k}}^\top=\left(P\left(y_{k}=1 \mid u_{k}=j^{*}\right) \cdots P\left(y_{k}=M \mid u_{k}=j^{*}\right)\right)^{\top} $$Dynamische Systeme
- Der aktuellen Ausgang $y_k$ ist abhängig von
- dem aktuellen Eingang $u_k$
- dem aktuellen Zustand $x_k$
- Aufteilung des dynamischen Systems in zwei Teile
- Systemabbildung (dynamischer Teil): beschreibt zeitliche Entwicklung des Zustands $x_k$
- Messabbildung (statischer Teil): beschreibt die Abbildung des Ausgang $y_k$ von Zustand $x_k$ (und evtl. von aktuellem Eingang $u_k$)
Systemabbildung
Zufallsvariable $x_k, k \in \mathbb{N}_0$ mit $x_k \in \{1, 2, \dots, N\}$
Entwicklung des Zustands $x_k$ bescrhieben ducrch
$$ P(x_{k+1}=i | x_k, \dots, x_1, x_0, u_k) $$($u_k$ oft explizit forgelassen)
Definition
Bei $x_k$ handelt es sich um eine Markov-Ketter (erster Ordnung), falls gilt
$$ P\left(x_{k+1}=i \mid x_{k}, \ldots, x_{1}, x_{0}, u_{k}\right)=P\left(x_{k+1}=i \mid x_{k}, u_{k}\right) $$Die zukünftige Entwicklung $x_{k+1}$ ist bedingt unabhängig von vergangen Zuständen $x_{k-1}, \dots, x_1, x_0$, falls aktueller Zustand $x_k$ bekannt ist
Vereinfachte Übergangswahrscheinlichkeit
$$ P(x_{k+1} = j| x_k = i) $$
Definition
Eine Markov-Kette wird als Zeithomogen oder allg. als zeitinvariant bezeichnet, falls die Übergangswahrscheinlichkeit nicht von Zeitindex abhängen, d.h. es gilt
$$ P\left(x_{k+1}=j \mid x_{k}=i\right)=\mathbf{A}(i, j) $$Übergangsmatrix (zeithomogen):
$$ \mathbf{A}=\left(\begin{array}{cccc} A(1,1) & A(1,2) & \ldots & A(1, N) \\\\ A(2,1) & A(2,2) & \cdots & A(2, N) \\\\ \vdots & \vdots & & \vdots \\\\ A(N, 1) & A(N, 2) & \cdots & A(N, N) \end{array}\right) $$Definition
Eine quadratische Matrix $\mathbf{A}$ heißt Markov-Matrix, falls
Alle Elemente nicht-negative sind
$$ A(i, j) \geq 0 \quad \text{ für } i, j \in \\{1, \dots, N\\} $$Die Zeilensumme gleich 1
$$ \sum_{i=1}^{N} A(i, j)=1 \quad \text{für } i \in \\{1, \dots, N\\} $$
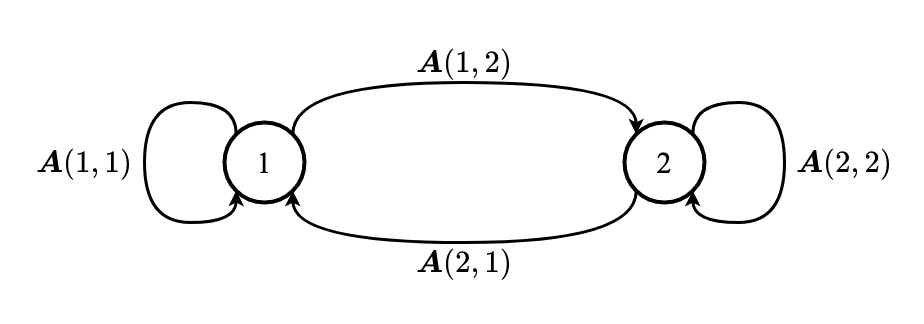
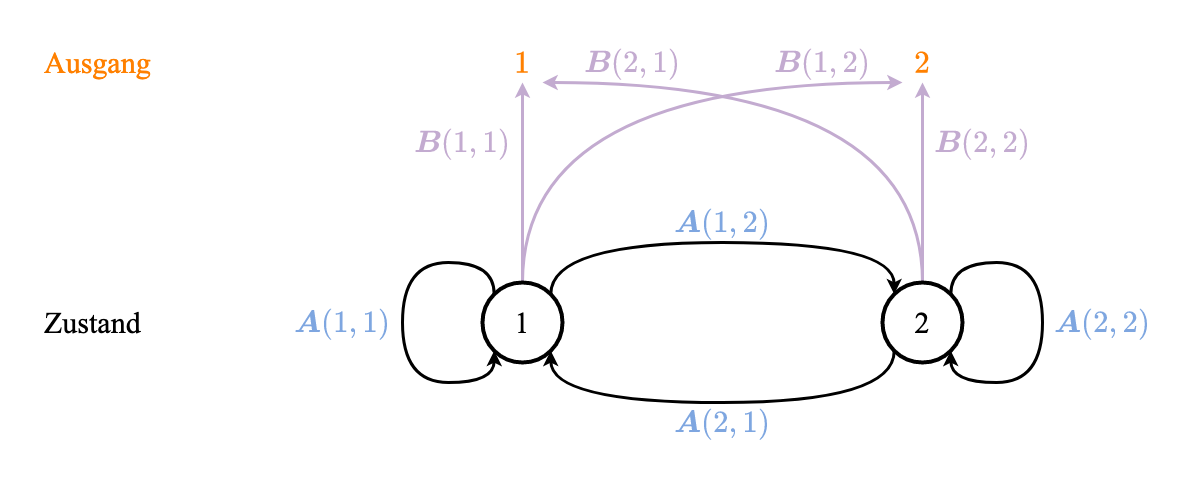
Graphische Darstellung einer Markov-Kette:
z.B. $N=2, x_k \in \\{1, 2\\}$
Messabbildung
Zustand typischerweise NICHT direkt verfügbar (latente Variable)
Messabbildung vom Zustand $x_k$ und dem aktuelle Eingang $u_k$ auf aktuelle Ausgang $y_k$
$$ P\left(y_{k}=j \mid x_{k}=i, u_{k}=m\right) $$- $u_k$ oft explizit forgelassen
Zeithomogen (allg. zeitinvariant)
$$ P\left(y_{k}=j|x_{k}=i\right)=B(i, j) $$Messe-/Beobachtungsmatrix
$$ \mathbf{B}=\left[\begin{array}{ccc} B(1,1) & \cdots & B(1, M) \\ \vdots & & \vdots \\ B(N, 1) & \cdots & B(N, M) \end{array}\right] $$
Gesamtes Dynamisches System
Hidden Markov Model
Zustand
- Wert $x_k, k=1,2,\dots$
- Verteilung $\eta_k^x, k=1,2,\dots$
Initialer Zustand
- Wert $x_0$
- Verteilung $\eta_0^x$
Eingänge
- Werte $u_k, k=0,1,\dots$
- Verteilung $\eta_k^u,k=0,1,\dots$
Ausgänge
- Werte $y_k, k=0,1,\dots$
- Verteilung $\eta_k^y,k=0,1,\dots$
Systemabbildung $\mathbf{A}_k$
Messabbildung $\mathbf{B}_k$
Graphische Darstellung
Ausgerollte zeitliche Abhängigkeit der Zufallsvariablen
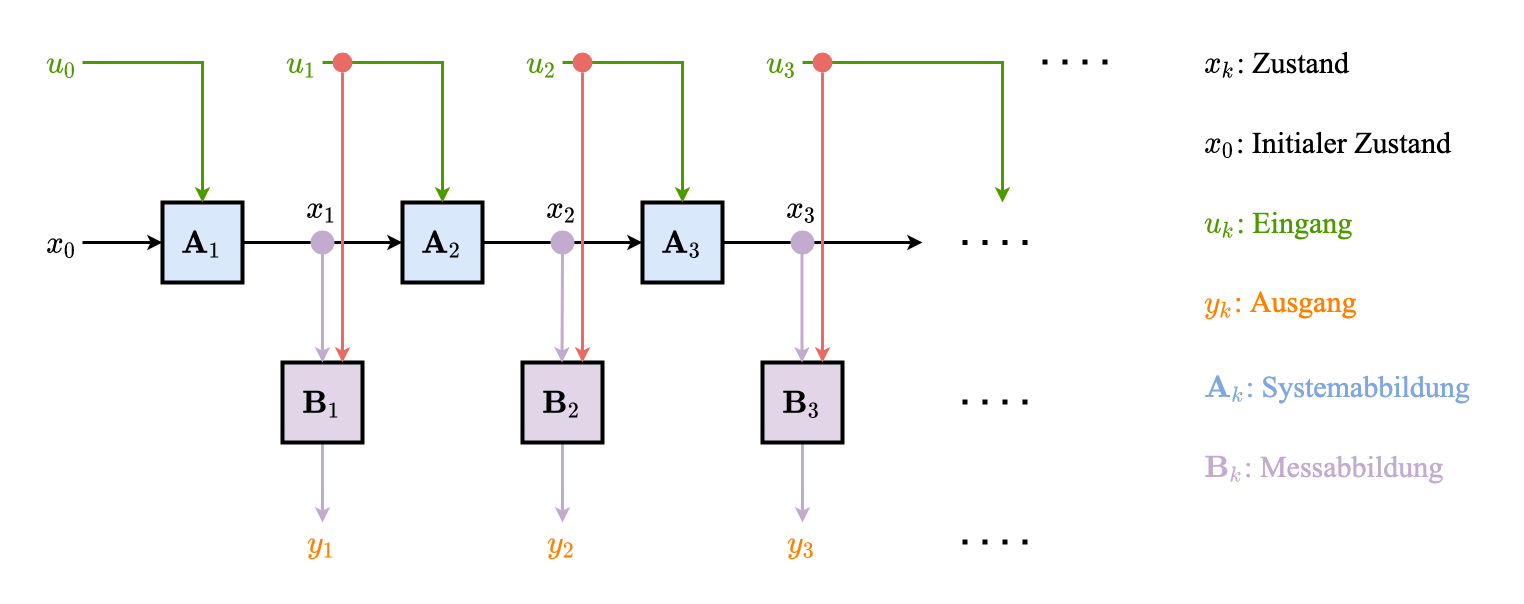
Markot-Kette (ausgerollte Darstellung)
Rekursive Darstellung der zeitliche Abbildung der Zufallsvariablen
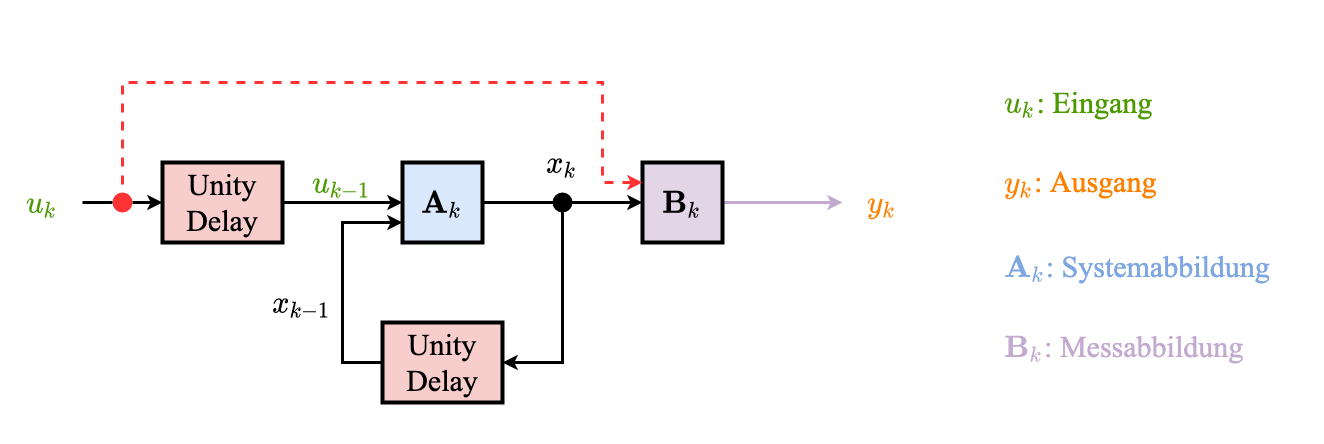
Markot-Kette (rekursive Darstellung)
Betont Übergange und Wahrscheinlichkeit
Markot-Kette (betont Übergange und Wahrscheinlichkeit)