Statische und Dynamische Systeme
Linearität
Gegeben ein System $S$
Zwei Bedingungen der Linearität
Skalierung
$$ \underline{x}_k \rightarrow \underline{y}_k \Rightarrow A \cdot \underline{x}_k \rightarrow A \cdot \underline{y}_k $$Superposition
$$ \begin{aligned} \underline{x}_k^1 \rightarrow \underline{y}_k^1, \quad \underline{x}_k^2 \rightarrow \underline{y}_k^2 \\ \Rightarrow \underline{x}_k^1 + \underline{x}_k^2 \rightarrow \underline{y}_k^1 + \underline{y}_k^2 \end{aligned} $$
Statische Systeme
Ein-/Ausgänge: Zufallsvektoren $\underline{u}_k$ und $\underline{y}_k$ ($k \in \mathbb{N}_0$ ist der Zeitschritt)
- $\underline{u}_k \in \mathbb{R}^P$ und $\underline{y}_k \in \mathbb{R}^M$ sind wertekontinuierlich
Abbildung von $\underline{u}_k$ und $\underline{y}_k$ durch lineare Abbildung
$$ \underline{y}_k = \mathbf{A}_k \cdot \underline{u}_k $$wobei $\mathbf{A}_k \in \mathbb{R}^{M \times P}$
Beschreibung der Unsicherheiten in $\underline{u}_k$ und $\underline{y}_k$ durch die ersten beiden Momente
- Erwartungswert
- $\underline{\hat{u}}_k := E\{\underline{u}_k\}$
- $\underline{\hat{y}}_k := E\{\underline{y}_k\}$
- Kovarianz Matrix
- $C_k^u := \operatorname{Cov}\{\underline{u}_k\}$
- $C_k^y := \operatorname{Cov}\{\underline{y}_k\}$
- Erwartungswert
Beschreibung der Kenngröße $\underline{\hat{y}}_k, C_k^y$ für gegebene $\underline{\hat{u}}_k, C_k^u$
$$ \begin{aligned} \hat{y}_{k} &=E\left\{\underline{y}_{k}\right\} \\ &=E\left\{A_{k} \cdot x_{k}\right\} \\ &=A_{k} \cdot E\left\{x_{k}\right\} \\ &=A_{k} \cdot \hat{\underline{u}}_{k} \\\\ C_{k}^{y} &=\operatorname{Cov}\left\{\underline{y}_{k}\right\} \\ &=E\left\{\left(y_{k}-\hat{y}_{k}\right)\left(\underline{y}_{k}-\underline{y}_{k}\right)^{\top}\right\} \\ &=E\left\{A_{k}\left(\underline{u}_{k}-\underline{\hat{u}}_{k}\right)\left(\underline{u}_{k}-\underline{\hat{u}}_{k}\right)^{\top} A_{k}^{\top}\right\} \\ &=A_{k} E\left\{\left(\underline{u}_{k}-\hat{u}_{k}\right)\left(\underline{u}_{k}-\underline{\hat{u}}_{k}\right)^{\top}\right\} A_{k}^{\top} \\ &=A_{k} \cdot C_{k}^{u} \cdot A_{k}^{\top} \end{aligned} $$
Dynamische Systeme
- Anregung hängt nicht nur vom aktuellen Eingang $\underline{u}_k$ ab (analog wie wertdiskrete Systeme), sondern auch vom aktuellen Zustand
- Zustände werden in internen Speichern gespeichert
- Gesamtsystem ("Gauß-Markov-Modell") besteht aus
- Systemabbildung
- Messabbildung
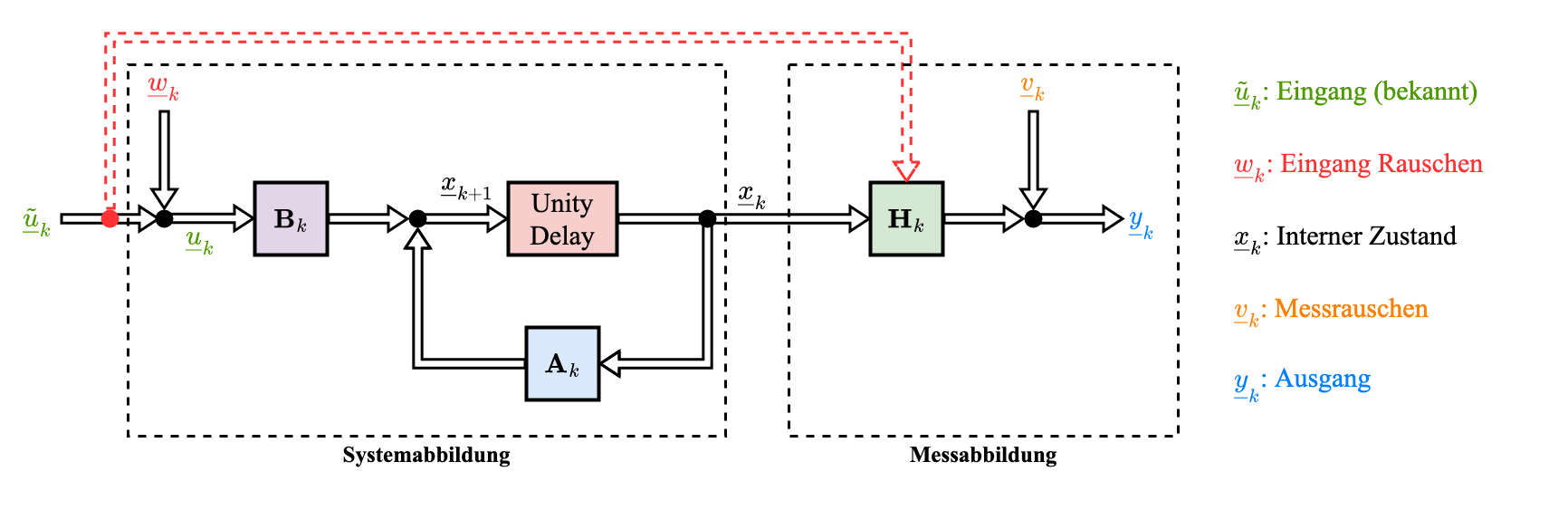
Graphische Darstellung von dynamischer Systeme
Systemabbildung
Definition
Ein lineares Zustandraummodell wird als zeitinvariant (Engl. Linear Time Invariant (LTI)) bezeichnet, falls die Systemmatrizen nicht von Zeitindex $k$ abhängen, also
$$ \mathbf{A}\_{k} = \mathbf{A}, \quad \mathbf{B}\_{k} = \mathbf{B} $$Zeitliche Entwicklung (linear)
$$ \underline{x}_{k+1}=\mathbf{A}_{k} \cdot \underline{x}_{k}+\mathbf{B}_{k} \cdot \underbrace{(\underline{\tilde{u}}_{k}+\underline{w}_{k})}_{=\underline{u}_{k}} $$Zustand: Zufallsvektor $\underline{x}_k \in \mathbb{R}^N, k\in \mathbb{N}_0$
Markov-Modell (erster Ordnung): $\underline{x}_{k+1}$ hängt NUR von $\underline{x}_{k}$ und $\underline{u}_{k}$ ab
Häufig wird $\underline{u}_{k}$ mit mittelwertfreien Rauschen argestellt
$$ \underline{u}_{k}=\underline{\tilde{u}}_{k}+\underline{w}_{k} $$- $\underline{\tilde{u}}_{k}$ bekannt
- Zufallsvektor $\underline{w}_{k}$ mit $E\{\underline{w}_k\} = \underline{0}, \operatorname{Cov}\{\underline{w}_k\} = c_k^w$
Messabbildung
Zustand $\underline{x}_k$ typischerweise NICHT verfügbar
Ausgang $\underline{y}_{k}$ hängt von $\underline{x}_k$ und evtl. von $\underline{u}_k$
Lineare Messabbildung
$$ \underline{y}_{k}=\mathbf{H}_{k} \cdot \underline{x}_{k}+\underline{v}_{k} $$- $\underline{v}_{k}$: additives mittelwertfreien Messrauschen ($E\{\underline{w}_k\} = \underline{0}, \operatorname{Cov}\{\underline{w}_k\} = c_k^w$ )
- Messabbildung ist zeitinvaraint, falls $\mathbf{H}_{k} = \mathbf{H}$
Einschub: Systemeigenschaften zeitdiskreter Systeme
Für Definitionen von Systemeigenschaften zeitdiskreter Systeme siehe Signale und Systeme1 Seite 312 - 314.
Linearität
Ein zeitdiskretes System $\mathcal{S}$ heißt linear, wenn für zwei beliebige Eingangssignale $y_{\mathrm{e} 1, n}$ und $y_{\mathrm{e} 2, n}$ und zwei beliebige Konstanten $c_1, c_2 \in \mathbb{R}$ oder $\mathbb{C}$
$$ \mathcal{S}\left\{c_{1} y_{\mathrm{e} 1, n}+c_{2} y_{\mathrm{e} 2, n}\right\}=c_{1} \mathcal{S}\left\{y_{\mathrm{e} 1, n}\right\}+c_{2} \mathcal{S}\left\{y_{\mathrm{e} 2, n}\right\} $$gilt.
Erweiterung auf auf $N$ Eingangssignale
$$ \mathcal{S}\left\{\sum_{i=1}^{N} c_{i} y_{\mathrm{e} i, n}\right\}=\sum_{i=1}^{N} c_{i} \mathcal{S}\left\{y_{\mathrm{e} i, n}\right\} $$Erweiterung auf unendlich viele Eingangssignale
$$ \mathcal{S}\left\{\sum_{i=-\infty}^{\infty} c_{i} y_{\mathrm{e} i, n}\right\}=\sum_{i=-\infty}^{\infty} c_{i} \mathcal{S}\left\{y_{\mathrm{e} i, n}\right\} $$
Zeitinvarianz
Ein zeitdiskretes System $\mathcal{S}$ heißt zeitinvariant, wenn es auf ein zeitlich verschobenes Eingangssignal $y_{\mathrm{e}, n-n_{0}}$ mit dem entsprechend zeitlichverschobenen Ausgangssignal $y_{\mathrm{a}, n-n_{0}}$ antwortet
$$ y_{\mathrm{a}, n}=\mathcal{S}\left\{y_{\mathrm{e}, n}\right\} \quad \Longrightarrow \quad y_{\mathrm{a}, n-n_{0}}=\mathcal{S}\left\{y_{\mathrm{e}, n-n_{0}}\right\}. $$Sonst heißen die Systeme zeitvariant.
Kausalität
Ein zeitdiskretes System S heißt kausal, wenn die Antwort NUR von gegenwärtigen oder vergangenen, nicht jedoch von zukünftigen Werten des Eingangssignals abhängt.
Dies bedeutet, dass für ein System $\mathcal{S}$ aus
$$ y_{\mathrm{e} 1, n}=y_{\mathrm{e} 2, n} \quad \text { für } n \leq n_{1} $$und
$$ y_{\mathrm{a} 1, n}=\mathcal{S}\left\{y_{\mathrm{e} 1, n}\right\}, \quad y_{\mathrm{a} 2, n}=\mathcal{S}\left\{y_{\mathrm{e} 2, n}\right\} $$stets
$$ y_{\mathrm{a} 1, n}=y_{\mathrm{a} 2, n} \quad \text { für } n \leq n_{1} $$folgt.
Beispiel
(Übungsblatt 5, Aufgabe 1)
Ein zeidiskretes wertekontinuierliches System $S$ wird durch die Differenzengleichung
$$ y_{k}-2^{k} \cdot y_{k+1}+3 \cdot y_{k+2}^{2}=4 \cdot u_{k}-2 \cdot u_{k+1} $$beschrieben.
Ist das System $S$ linear?
Das System $S$ ist aufgrund des Terms $y_{k+2}^{2}$ NICHT linear.
Ist das System $S$ zeitinvariant?
Das System $S$ ist wegen des zeitabhängigen Koeffizienten $2^k$ von $y_{k+1}$ zeitvariant.
Ist das System $S$ kausal?
Das System $S$ ist kausal, da $y_{k+2}$ nur von vergangenen Eingangswerten abhängt.
F. P. León and H. Jäkel. Signale und Systeme. De Gruyter Oldenbourg, Berlin, Boston, 02 Sep. 2019. ISBN 978-3-11-062632-2. doi: https://doi.org/10.1515/9783110626322. URL https://www.degruyter.com/view/title/543041. ↩︎