Statische und Dynamische Systeme
Statische Systeme
Ein-/Ausgang: Zufallsvektoren $\underline{u}_k$ und $\underline{y}_k$ ($k \in \mathbb{N}_0$ ist der Zeitschritt)
- $\underline{u}_k \in \mathbb{R}^P$ und $\underline{y}_k \in \mathbb{R}^M$ sind wertekontinuierlich
Abbildung von $\underline{u}_k$ und $\underline{y}_k$ durch nichtlineare Abbildung
$$ \underline{y}_{k}=\underline{a}_{k}\left(\underline{u}_{k}\right) \tag{Generatives Modell} $$Beschreibung der Unsicherheit in $\underline{u}_k$ und $\underline{y}_k$ durch Dichten
- $\underline{u}_k$ : $f_{k}^{u}\left(\underline{u}_{k}\right)$
- $\underline{y}_k$ : $f_k^y(\underline{y}_k)$
Gesucht: $f_k^y(\underline{y}_k)$ zu gegeben $f_{k}^{u}\left(\underline{u}_{k}\right)$
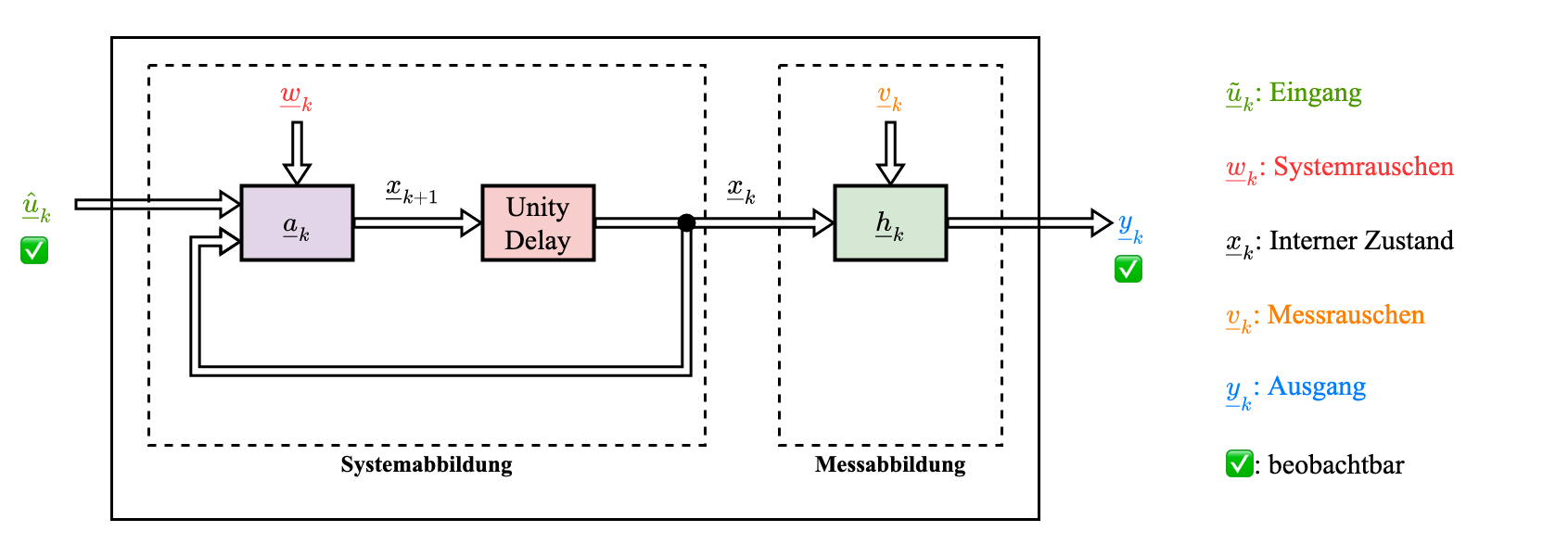
Dynamische Systeme
Systemabbildung
Zustand $\underline{x}_k, k \in \mathbb{N}_0$ mit $\underline{x}_k \in \mathbb{R}^N$
Nichtlineare System (allg.)
$$ \underline{x}_{k+1}=\underline{a}_{k}\left(\underline{x}_{k}, \underline{\hat{u}}_{k}, \underline{w}_{k}\right) $$Beschreibung von $\underline{x}_k$ durch Dichte $f_k^x(\underline{x}_k)$
Spezielle Rauschstruktur: Additives Rauschen
$$ \underline{x}_{k+1}=\underline{a}\left(\underline{x}_{k}, \underline{\hat{u}}_{k}\right)+\underline{w}_{k} $$Systemrauschen $\underline{w}_k$ wird beschrieben durch Dichte $f_k^w(\underline{w}_k)$
Typische Annahme
$\underline{w}_k$ ist Gauß verteilt mit bekannten Parametern
$\underline{w}_k$ ist weißes Rauschen
White noise: uncertainties taken at different time steps are independent
Messabbildung
Nichtlineare Abbildung (allg.)
$$ \underline{y}_{k}=\underline{h}_{k}\left(\underline{x}_{u}, \underline{v}_{k}\right) $$Spezialfall: Additives Rauschen
$$ \underline{y}_{k}=\underline{h}_{k}\left(\underline{x}_{u}\right) + \underline{v}_{k} $$Rauschen $\underline{v}_{k}$ beschrieben durch $f_k^v(\underline{v}_k)$
Gesammtsystem
Lineare Vs. Nichtlineare Systeme
| Linear | Nichtlinear | |
|---|---|---|
| Systemabbildung | $\underline{x}_{k+1} = \mathbf{A}_k \underline{x}_k + \mathbf{B}_k (\underline{u}_k + \underline{w}_k)$ | $\underline{x}_{k+1} = \underline{a}_k(\underline{x}_k, \underline{u}_k, \underline{w}_k)$ |
| Messabbildung | $\underline{y}_{k} = \mathbf{H}_k \underline{x}_k + \underline{v}_k$ | $\underline{y}_k = \underline{h}_k (\underline{x}_k, \underline{v}_k)$ |