Wertediskrete Systeme
Wonham Filter
Zustandschätzung für wertediskrete Systeme: Wonham Filter
Prädiktion
$$ \underline{\xi}_{k}^{p}=\mathbf{A}^{\top} \underline{\xi}_{k-1}^{e} $$Filterung
$$ \underline{\xi}_{k}^{e} \overset{y_k = m}{=} \frac{\mathbf{B}(:, m) \odot \underline{\xi}_{k}^{p}}{\mathbf{B}(:, m)^\top \cdot \underline{\xi}_{k}^{p}} $$
Üb 4, A2
Herleitung
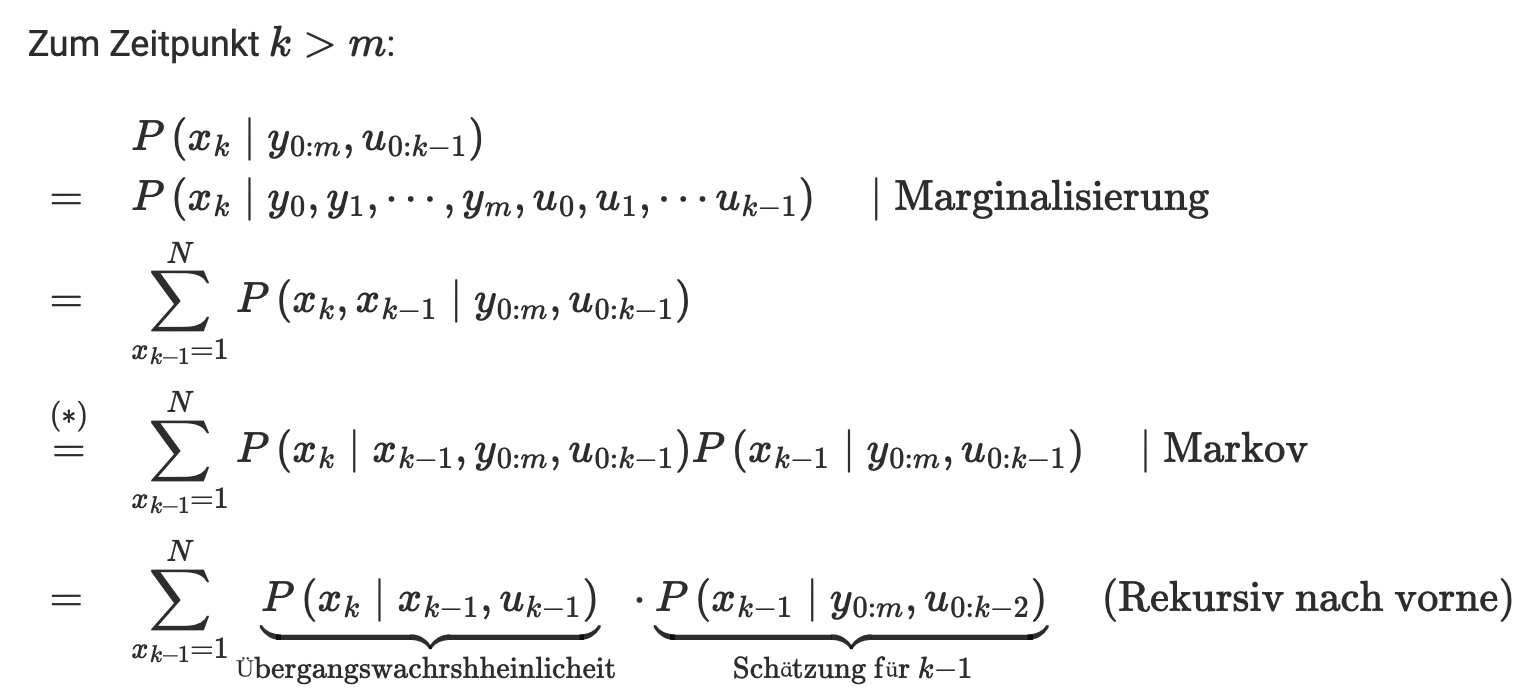
Prädiktion $P(x_k \mid y_{0:m}, u_{0:k-1})$ für $k > m$
nach $x_{k-1}$ marginalisieren
Bayes einsetzen
$$ P(a, b \mid c) = P(a \mid b, c) \cdot P(b \mid c) \qquad (\ast) $$Markov Eigenschaft verwenden
Filterung: $P\left(x_{k} \mid y_{1: k}, u_{0: k-1}\right)$
- $P\left(x_{k} \mid y_{1: k}, u_{0: k-1}\right) = P(x_{k} \mid y_k, y_{1: k-1}, u_{0: k-1})$
Bayes einsetzen
$$ P(b \mid a, c) \cdot P(a \mid c)=P(a \mid b, c) \cdot P(b \mid c) \quad (\triangle) $$Schreibe in Form $\frac{\text{Likelihood} \cdot \text{Prädiktion}}{\text{Normalisierungskonstant}}$
$$ P\left(x_{k} \mid y_{1: k}, u_{0: k-1}\right) = \frac{\overbrace{P\left(y_{k} \mid x_{k}\right)}^{\text{Likelihood}} \cdot \overbrace{P\left(x_{k} \mid y_{1: k-1}, u_{0: k-1}\right)}^{\text{Einschritt-Prädiktion}}}{\underbrace{P\left(y_{k} \mid y_{1: k-1}, u_{0: k-1}\right)}_{\text{Normalisierungskonstant}}} $$Likelihood: $P\left(y_{k} \mid x_{k}\right) = \mathbf{B}(x_k, y_k)$
Prädiktion erhalten wir in Prädiktionsschritt
Normalisierungskonstant
Marginalisierung nach $x_k$
Bayes einsetzen
$$ P(a, b \mid c) = P(a \mid b, c) \cdot P(b \mid c) \qquad (\ast) $$
Komplexitätsproblem bei der Diskretisierung eines allgemeinen Systems
Riesiger Speicherbedarf von Wahrscheinlichkeitsvektor und Transitionsmatrix